
www.industrieweb.fr
22
'20
Written on Modified on
FLIR Systems Trading Belgium BVBA
Interfaces pour la vision artificielle
Il est essentiel de choisir la bonne interface pour votre application de vision artificielle dans le processus de sélection de votre caméra. Les sections suivantes donnent un aperçu des différents types de câbles et de connecteurs disponibles pour les applications de vision artificielle, en précisant les avantages et les inconvénients connexes.

Interfaces dédiées
Pratiques pour toute application impliquant des vitesses extrêmement élevées ou une très haute résolution, pour laquelle l’utilisation de telles interfaces est nécessaire ; par exemple les caméras à balayage linéaire utilisées pour inspecter des processus à flux continu comme la production de papier ou de films plastiques, où les caméras fonctionnent souvent à des fréquences exprimées en kHz. Toutefois, ces interfaces ont tendance à être nettement plus coûteuses, moins flexibles et à accroître la complexité du système. CarmeraLink (supporte jusqu’à 6,8 Gbit/s de données) et CoaXPress (supporte jusqu’à 12 Gbit/s) sont des interfaces dédiées à la vision artificielle et généralement utilisées dans de telles applications. Parallèlement aux caméras, les systèmes utilisant ces interfaces nécessitent des cartes d’acquisition d’images. Ce sont des cartes d’adaptation spécifiques permettant de recevoir des données d’images et de les assembler en images utilisables. Les interfaces dédiées à la vision artificielle utilisent également des câbles propriétaires, ce qui rend l’intégration à d’autres périphériques légèrement plus délicate.
CoaXPress (CXP)
L’interface CoaXpress a été lancée en 2008 pour prendre en charge les applications d’imagerie à grande vitesse. Les interfaces CXP utilisent des câbles coaxiaux de 75 ohms, supportent des vitesses de transfert de données allant jusqu’à 6,25 Gbit/s par canal et permettent d’utiliser plusieurs canaux pour obtenir une vitesse de transfert de données encore plus élevée. Un câble CXP peut fournir jusqu’à 13W de puissance par câble et nécessite que le « dispositif » et « l'hôte » prennent en charge l’interface de programmation des caméras GenICam. Bien que les câbles coaxiaux à une seule voie soient peu coûteux, le coût des assemblages de câbles à plusieurs voies et des cartes d’acquisition augmente rapidement.
CameraLink
Le protocole CameraLink a été lancé en 2000 par l’Automated Imaging Association (AIA) et a été progressivement mis à niveau pour supporter des débits de données plus élevés, certaines versions nécessitant deux câbles pour la transmission. Les trois principales configurations disponibles sont les suivantes : Base (2,04 Gbit/s), Medium (5,44 Gbit/s) et Déca/Extended (6,8 Gbit/s). La configuration Base utilise un connecteur MDR (« Mini D Ribbon ») à 26 broches, tandis que la configuration Medium/Full double la capacité avec un second câble. Les versions Deca/Extended vont au-delà des limites imposées par CameraLink, transmettant jusqu’à 6,8 Gbit/s de données. À l’instar des interfaces CXP, CameraLink nécessite des cartes d’acquisition d’images et doit également être compatible avec le protocole Power over Camera Link (PoCL) afin que le système soit alimenté. CameraLink n’a aucune capacité de correction d’erreur ou de renvoi ; des configurations de câbles coûteuses et encombrantes sont donc nécessaires afin d’essayer d’éliminer les images perdues en maximisant l’intégrité du signal.
Interfaces grand public
Ces interfaces permettent aux caméras de vision artificielle de se connecter à des systèmes hôtes en utilisant les protocoles USB et Ethernet les plus courants. Pour la plupart des applications de vision artificielle, les interfaces grand public USB 3.1 Gen 1 et Gigabit Ethernet offrent un mélange réussi de commodité, de vitesse, de simplicité et de prix. En outre, les interfaces grand public prennent en charge le matériel et les périphériques les plus courants pour mettre en œuvre la vision artificielle. Les concentrateurs, commutateurs, câbles et cartes d’interface USB et Ethernet peuvent être achetés partout et à différents prix, depuis Amazon jusqu’à votre magasin local de matériel électronique ou informatique, pour répondre exactement à vos besoins. La plupart des PC, ordinateurs portables et systèmes intégrés comportent au moins un port Gigabit Ethernet et un port USB 3.1 Gen 1.
Ces catégories d’interfaces se distinguent surtout par leur largeur de bande. Des interfaces plus rapides permettent des fréquences d’images plus élevées (Fig. 1) pour une résolution donnée. Une interface plus rapide vous permet de capturer plus d’images par seconde ou de capturer des images de plus haute résolution sans devoir réduire le débit.
Par exemple, si l’on passe d’un système d’inspection de plaquettes de semi-conducteurs de 8 po (200 mm) au même système, mais pour des plaquettes à 12 po (300 mm), des caméras à plus haute résolution seront nécessaires. Dans ce cas, le concepteur du système devra choisir entre conserver son interface existante en élevant la résolution plus élevée tout en réduisant le débit, ou passer à une interface plus rapide pour maintenir ou améliorer le débit.
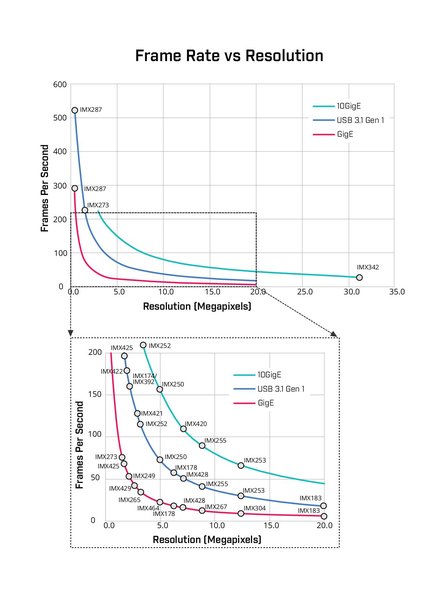
Fig. 1. Largeur de bande disponible pour chaque interface en fonction de la résolution du capteur et de la fréquence d’images obtenue.
Vos exigences en matière de résolution, de fréquence d’images, de longueur de câble et de configuration du système hôte doivent toutes être prises en compte de manière à obtenir les performances dont vous avez besoin sans dépenser plus que nécessaire. Les caméras de vision artificielle FLIR prennent en charge les trois interfaces fiables et disponibles à grande échelle.
Universal Serial Bus (USB)
L’USB est partout. Regardez autour de vous et comptez le nombre de périphériques et d’accessoires USB qui vous entourent. Vous comprenez son importance ? La plupart des caméras de vision artificielle USB utilisent l’interface USB 3.1 Gen 1. Cette interface fournit jusqu’à 4 Gibt/s de bande passante dédiée aux données d’image entre la caméra et le système hôte. Le protocole USB3 Vision vise à assurer la compatibilité entre un grand nombre de caméras et de logiciels en définissant un ensemble commun de protocoles de détection de dispositifs, de transfert d’images et de contrôle de caméras.

Fig. 2. Câble USB 3.1 Gen1 (câble USB et câble de verrouillage USB)
L’USB prend en charge l’accès direct à la mémoire (DMA). Grâce à cette capacité DMA, les données d’image peuvent être transférées directement de l’USB à la mémoire où elles sont accessibles pour être utilisées par un logiciel. Le DMA, associé au support généralisé du protocole USB et à la disponibilité de pilotes pour les contrôleurs USB sur pratiquement toutes les plateformes matérielles, rend le protocole USB idéal pour une utilisation dans les systèmes intégrés. La longueur maximale de 5 m du câble USB 3.1 Gen 1 n’est généralement pas un problème pour les systèmes intégrés. L’USB 3.1 Gen 1 peut simplifier la conception du système en fournissant jusqu’à 4,5 W de puissance à une caméra. Les récentes caractéristiques du protocole USB Power Delivery permettent à certains hôtes de fournir plus de puissance à des appareils tels que les téléphones mobiles à chargement rapide. Ces caractéristiques ne dépendent pas de la norme de base USB 3.1 Gen 1 et n’ont pas été adoptées par les fabricants de caméras de vision artificielle.
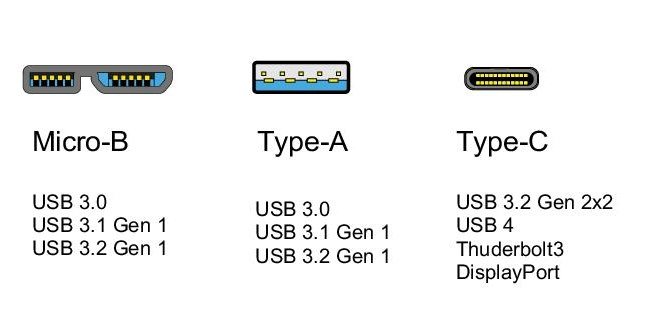
Fig. 3. Différents types de connecteurs USB
Les câbles USB à haute flexibilité permettent de maximiser la durée de vie des câbles dans des systèmes où la caméra doit être régulièrement déplacée. Les câbles optiques actifs (AOC) peuvent être utilisés pour étendre considérablement la distance de travail et ainsi offrir une résistance aux interférences électromagnétiques (EMI). Leur performance dépend des exigences de débit et de la configuration du système hôte. En cas d’utilisation de câbles optiques, même ceux qui fournissent de l’énergie, FLIR recommande d’utiliser l’alimentation externe des caméras via les ports GPIO. Par ailleurs, des câbles de verrouillage USB assurent une connexion sécurisée entre les câbles, les caméras et les systèmes hôtes. Avant d’acheter des câbles de verrouillage, FLIR recommande de vérifier la position des vis de verrouillage et la compatibilité de l'espacement, sachant que plusieurs options sont disponibles.
L’USB 3.1 Gen 1 est disponible sur les versions boîtier et carte du modèle FLIR Blackfly S, ainsi que sur le modèle réduit Firefly S.
Gigabit Ethernet (GigE)
La technologie GigE fournit jusqu’à 1 Gbit/s de bande passante dédiée aux données d’image. En combinant simplicité, vitesse, longueur de câble maximale de 100 m et capacité à alimenter les caméras par un seul câble, ce standard est extrêmement apprécié au niveau des interfaces de caméra. Les câbles Ethernet sont disponibles avec une protection renforcée. Ils sont particulièrement adaptés aux environnements présentant de fortes interférences électromagnétiques causées par la proximité de puissants moteurs de certains robots et équipements de métrologie. Les caméras GigE FLIR proposent également une fonction de renvoi de paquet, améliorant davantage la fiabilité de la transmission.
Contrairement au protocole USB, la technologie GigE ne supporte pas le DMA. Les paquets contenant des données d’image sont transmis à l’hôte où ils doivent être réassemblés en cadres d’image avant d’être copiés dans la mémoire accessible du logiciel. Ce processus est simple pour les PC modernes, mais il peut entraîner des latences pour certains systèmes intégrés à faible puissance et dotés de ressources système limitées.

Fig. 4. Câble Gigabit Ethernet / GigE (RJ45 à RJ45)
L’adoption généralisée de la technologie Gigabit Ethernet se traduit par une gamme incroyablement large de produits de support, allant des câbles aux commutateurs, capables de répondre à toutes les exigences d’un projet. Les caméras GigE prennent en charge le protocole de synchronisation temporelle PTP IEEE1588, ce qui permet aux caméras et aux autres appareils compatibles avec Ethernet, tels que les actionneurs et les automates programmables industriels, de fonctionner sur une base de temps commune et synchronisée de manière précise.
L’adoption généralisée du réseau Ethernet dans de nombreuses industries a permis de voir apparaître de nombreux câbles et connecteurs spécifiques pour un grand nombre de cas d’utilisation. Par exemple, il existe des câbles Ethernet conçus pour protéger contre les interférences électromagnétiques (EMI), les hautes températures et les produits chimiques, mais aussi des câbles qui offrent une grande flexibilité ou d’autres avantages.
Les câbles Ethernet ont un numéro de catégorie en fonction de leur construction. Le CAT5e est le plus courant en matière de GigE, tandis que les CAT6A, CAT7 et CAT8 peuvent être utilisés pour offrir une résistance EMI supplémentaire moyennant un coût plus élevé et un diamètre de câble plus important. Certains appareils industriels utilisent un connecteur M12 avec codage X (Fig. 3, à droite) pour assurer une meilleure protection. Toutefois, pour la plupart des applications, le connecteur RJ-45 traditionnel est suffisant et offre une meilleure satisfaction à moindre coût. De plus, les connecteurs RJ45 verrouillables par vis ajoutent facilement une sécurité supplémentaire aux câbles RJ45.
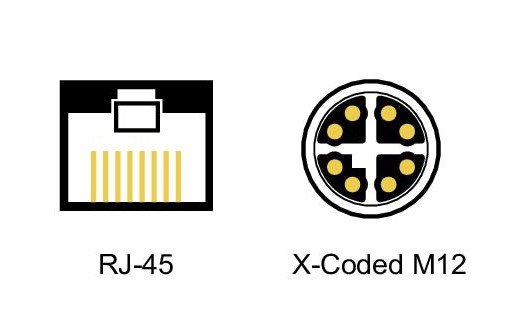
Fig. 5. Le connecteur RJ45 très largement répandu (à gauche) et le connecteur M12 avec codage X, moins courant (à droite)
Remarque : le connecteur RJ45 se branche et se débranche rapidement. Le connecteur M12 avec codage X (à droite) est plus lent à connecter, mais plus résistant et disponible en versions certifiées IP.
GigE est disponible sur carte du modèle FLIR Blackfly S.
10Gigabit Ethernet (10GigE)
La technologie 10GigE s’appuie sur les points forts de son homologue GigE en augmentant la bande passante à 10 Gbit/s. La 10GigE est la solution idéale pour toute interface intégrant la numérisation 3D haute résolution, la capture volumétrique et la métrologie de précision. Les technologies 10GigE et GigE peuvent être combinées de nombreuses façons. Plusieurs caméras GigE peuvent être connectées à un commutateur 10GigE pour prendre en charge plusieurs caméras GigE à pleine vitesse sur un seul port 10GigE d’un système hôte. Si les câbles CAT5e fonctionnent avec les caméras 10GigE sur des distances inférieures à 30 m, les câbles CAT6A ou supérieurs sont recommandés.
10Gbit/sec, c’est énormément de données ! Les systèmes PC modernes dotés de processeurs à haut débit, de PCIe 3.0 et de mémoire à double canal peuvent tout à fait traiter ce volume, mais des systèmes plus performants peuvent aller plus loin et prendre en charge plusieurs caméras 10GigE. Les systèmes intégrés disposant de ressources système réduites ne disposent généralement pas de la bande passante mémoire et de la vitesse de processeur nécessaires pour traiter ce volume de données d’image entrantes.
La technologie 10GgiE est disponible sur les caméras FLIR Oryx.
Résumé
Les interfaces grand public et dédiées sont utilisées dans de nombreuses applications de vision artificielle. Les avantages et les inconvénients mentionnés dans les sections précédentes détermineront finalement si l’un ou l’autre convient à un cas d’utilisation précis. Toutefois, la combinaison des performances, de la facilité d’utilisation, de la disponibilité généralisée et du faible coût font des interfaces grand public un choix intéressant pour la plupart des applications de vision artificielle.
