www.industrieweb.fr
23
'21
Written on Modified on
Fuzzy Logic et Visionic : la robotique au service du nucléaire
PRIMUS (Platform for Robotic Inspection and Maintenance for Unstructured Settings) développé par Fuzzy Logic et Visionic pour Framatome Intercontrôle est un système de CND (Contrôle Non Destructif) robotisé d’infrastructures nucléaires. Cet ensemble logiciel et matériel est utilisable par des opérateurs de CND non roboticiens, facteur de différenciation majeur par rapport aux solutions existantes sur les marchés de la robotique et des CND. La collaboration entre Fuzzy Logic, Visionic et Framatome est née dans le cadre de RIMA (Robotics for Inspection and Maintenance), un projet de l'Union Européenne qui vise à établir un réseau de ‘Digital Innovation Hubs’ et d'associations industrielles pour soutenir le développement de la robotique.

Dans l’objectif de surmonter ces défis, Framatome Intercontrôle utilise des robots industriels de manière innovante pour résoudre de nombreuses problématiques de CND. Une détection par ultrason exécutée par un robot vient caractériser les défauts volumétriques internes de la soudure afin de détecter d’éventuelles fissures. Actuellement, ces inspections sont préparées en amont sur site et nécessitent un scan 3D de la soudure et la mesure de l’environnement, chaque soudure et chaque environnement étant uniques géométriquement. Un roboticien calcule ensuite la trajectoire du robot pour l’inspection future. Au moment de l’inspection, si l’environnement est différent des mesures initiales ou ne correspond pas avec exactitude au scan archivé, il n’est plus possible d’adapter directement la trajectoire préparée ; il faut ajuster de nouveau les mesures et les calculs de trajectoire. Or l’environnement nucléaire est complexe et soumis à des règles de sécurité très contraignantes : chaque intervention est donc coûteuse en termes de ressources humaines, d’autant que le seuil d’exposition aux radiations d’un personnel est de 12 millisievert par an, ce qui renchérit le coût des interventions de reprise quand elles deviennent nécessaires.
Selon M. Yannick Caulier, Expert I, VTI niveau III, COFFMET niveau II chez Framatome / Intercontrôle : « la préparation des inspections est complexe, longue et coûteuse car l’environnement n’est pas aisé à modéliser. C’est pourquoi nous recherchions un logiciel qui permette de redéfinir facilement des trajectoires afin d’adapter nos inspections sur les sites nucléaires ».
Les robots industriels et les outils de programmation actuels ne sont pas adaptés à des environnements de terrain non structurés. En outre, leur utilisation et leur programmation nécessitent une bonne expertise. Pour remédier à ces contraintes, Fuzzy Logic et Visionic ont développé la plateforme PRIMUS.
Primus, une plateforme logicielle inédite
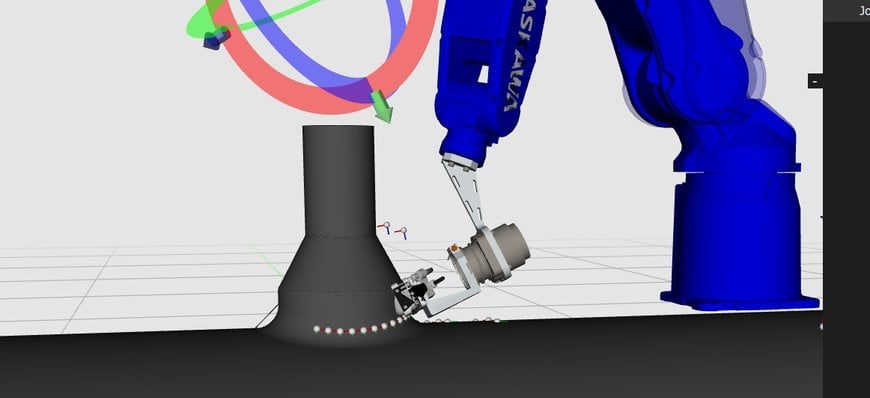
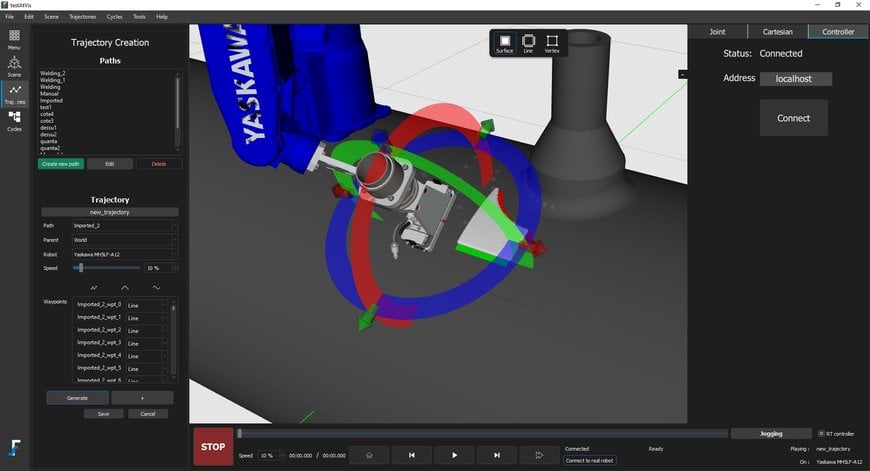
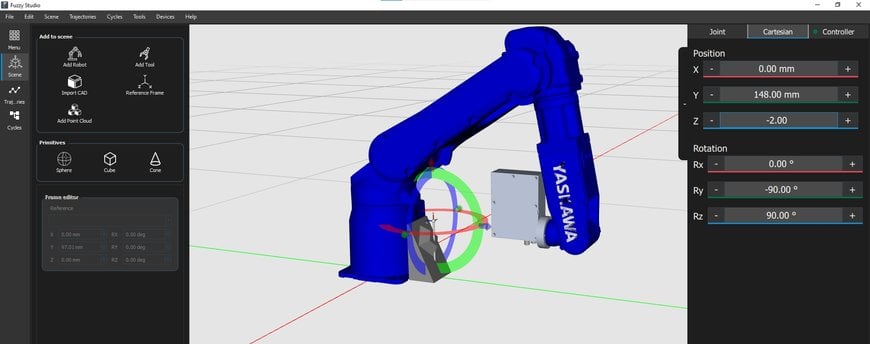
La plateforme logicielle et hardware PRIMUS permet aux prestataires de services CND de répondre aux demandes d’inspection d'infrastructures rapidement et efficacement. Son fonctionnement est simple : la première étape consiste à modéliser l’environnement, tel qu’il est au moment de l’inspection. Des éléments complémentaires éventuels susceptibles de gêner la trajectoire sont alors intégrés dans cette étape de modélisation, la simulation du processus avant l’inspection sur site est alors complète. A la deuxième étape, un robot est mis en place à proximité des zones de soudure de la tuyauterie. L’exigence de précision de déplacement de la sonde d’inspection demande l’utilisation d’un robot pour obtenir un positionnement et une orientation précis. Grâce au logiciel mis au point par Fuzzy Logic, Fuzzy Studio, le robot peut être mis en place par les opérateurs rapidement, sans nécessiter d’importantes précisions de positionnement sur la tuyauterie. Les capteurs 3D intégrés sur le robot permettent de recaler rapidement et simplement le robot dans son environnement réel./ Les trajectoires peuvent être déterminées en quelques secondes et quelques clics de souris. La combinaison entre la trajectoire complexe calculée par Fuzzy Studio et le scan 3D de la structure de la soudure par Visionic génère la trajectoire d’inspection adaptée à la surface réelle. La dernière étape consiste en l’inspection de la soudure par ultrasons.
Cette méthode est inédite dans le domaine des CND, et les résultats obtenus sont beaucoup plus précis grâce à la maîtrise du positionnement de la sonde, qui a été adaptée grâce au scan 3D de la surface.
Visionic propose les robots et leur système optique. Fuzzy Logic apporte une amélioration des conditions de programmation agile, réalisée par des non roboticiens, qui élimine de nombreuses étapes de réglage. Framatome Intercontrôle a fourni à la fois le savoir-faire et un banc d'essai d'inspection des soudures par CND robotisé pour développer, tester et valider la solution PRIMUS dans un environnement opérationnel.
Le système PRIMUS a reporté le temps d'inspection de Framatome Intercontrôle de deux semaines à une seule journée.
De plus, PRIMUS augmente l'efficacité, la qualité et la sécurité des contrôles non destructifs tout en diminuant l'exposition des opérateurs aux radiations. Grâce à la coopération et au soutien des partenaires du réseau RIMA, le système PRIMUS a été développé, déployé et testé en un temps record, 14 mois, plaçant ainsi la robotique industrielle au premier plan de l'inspection des infrastructures nucléaires.
Yannick Caulier déclare : « le logiciel no code, ergonomique et versatile, utilisable sur tous les robots de PRIMUS nous offre une accessibilité inédite. On peut placer le robot où on le souhaite et générer sa trajectoire en quelques clics. C’est un des aspects qui nous a le plus séduit ».
Une collaboration efficace
Ryan Lober, CEO et co-fondateur de Fuzzy Logic : « Framatome, comme nombre d’autres industriels, repoussent les limites de ce que nous pensons pouvoir faire avec des robots industriels ; ils sont cependant bridés par les outils experts. En proposant une solution accessible aux non-experts, nous déverrouillons ces applications, autrefois pensées comme impossibles. »
D’après Xavier Savin : « cette application spécifique pour Framatome qui répond à une problématique particulière est transposable partout où l’inspection santé matière réalisée par ultrasons sur des surfaces dont la géométrie est mal maîtrisées. Notre solution peut être étendue dans les applications robotiques où une définition de trajectoire différente importe. Plus il y aura de variabilités des trajectoires et plus la solution trouvera sa signification. »
Yannick Caulier explique de son côté que le logiciel dédié à cette application peut être étendu à d’autres inspection de types de soudures. « Le prototype est voué à évoluer avec des fonctionnalités nouvelles et la fluidification de la chaîne d’inspection ».
RIMA, un pari audacieux
La collaboration entre Framatome, Fuzzy Logic et Visionic s’est nouée à l’automne 2019, via le consortium RIMA. Framatome portait une demande atypique en robotique puisque son besoin était situé dans un environnement non expert : il s’agissait de concevoir une plateforme logicielle qui définisse des trajectoires pour adapter des inspections de soudures de tuyauteries sur un site nucléaire. Visionic et Fuzzy Logic, ont répondu ensemble, convaincus du potentiel technologique inédit de leur solution.
RIMA a subventionné les coûts de R&D pour le consortium Visionic et Fuzzy Logic à hauteur de 300 000 €.
« RIMA a financé une technologie qui n’existait auparavant pas, pour réponse à un besoin atypique. Le pari de RIMA est gagnant puisqu’en 14 mois, notre solution PRIMUS développée par une start-up et une PME innovante, a démontré la force de son impact dans un secteur réputé difficile. », se réjouit Ryan Lober.
Xavier Savin , de son côté, explique « nous étions conscient du potentiel commercial au-delà de notre solution technique. Le débouché commercial international de Primus est réel.
Chacun des 56 réacteurs nucléaires en France doit faire l’objet d’un grand carénage, c’est-à-dire de poursuivre l’exploitation des réacteurs après 40 ans d’exploitation. Le remplacement des tuyauteries est coûteux et complexe dans cet environnement. Notre solution qui caractérise les défauts et dont les résultats sont fiables, permet de décider au plus juste des étapes de maintenance après inspection. Notre solution offre un potentiel économique considérable. Il est à multiplier par le nombre de centrales en Europe et dans le monde. »
flr.io