
www.industrieweb.fr
11
'20
Written on Modified on
Solutions avancées de protection des circuits pour les véhicules connectés et autonomes
Mots clés SEO : ADAS, décharges électrostatiques, interférences électromagnétiques, transitoires, surtension, protection contre les surtensions, C2X, V2X, TVS, diode, réseau de diodes, Zener, diode Zener, CAN, Ethernet, FlexRay, LIN, HDBaseT, AEC-Q200, AEC-Q101, ISO7637-2, ISO16750-2, ISO10605: 2008, AEC.
À mesure que l’industrie automobile réalise des progrès dans le domaine des véhicules semi-autonomes et entièrement autonomes, les divers systèmes électroniques complexes et sensibles se multiplient exponentiellement. L’automatisation des véhicules promet d’apporter de nombreux bienfaits à notre société en rendant nos routes plus sûres, en réduisant le nombre d’accidents et en évitant de façon proactive la formation d’embouteillages. Cependant, pour être aussi fiables que sûrs, ces systèmes autonomes nécessitent de multiples capteurs et sous-systèmes interconnectés hautes performances.
Cela représente un véritable défi technologique que l’environnement des véhicules électriques et hybrides, typiquement très électrifié et donc très exposé au bruit de mesure, ne rend que plus difficile à relever. En effet, le risque est très élevé que ces systèmes perturbent le bon fonctionnement d’autres systèmes vitaux des véhicules, que ce soit à cause de facteurs internes tels que les champs électromagnétiques ou les tensions transitoires ou à cause de facteurs externes comme les infrastructures C2X installées sur les routes.
Les systèmes avancés d'aide à la conduite (ADAS) constituent la pierre angulaire du caractère autonome d’un véhicule. Dans le cas d’un véhicule entièrement autonome, ces systèmes sont complétés par des applications plus complexes et plus sophistiquées. En mode semi-autonome (du niveau 1 au niveau 3), ils doivent être capables d’informer directement le conducteur de toute situation imminente. La figure 1 illustre les différents niveaux d’automatisation d’un véhicule.
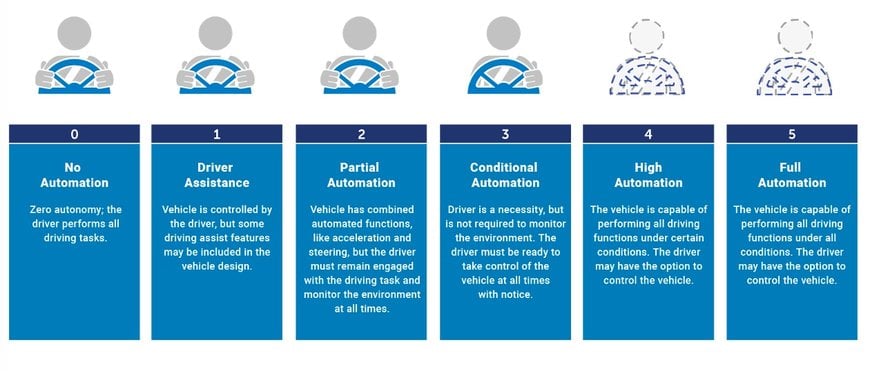
Figure 1 : niveaux d’automatisation des véhicules, tels que définis par la Society of Automotive Engineers.
Dans le présent article, nous présenterons d’abord l’architecture des systèmes de détection avancés des véhicules autonomes ainsi que les protocoles et interfaces utilisés pour transmettre les données entre les différents sous-systèmes d’un véhicule. Nous examinerons ensuite quelles sont les sources d’interférences et avancerons enfin des techniques permettant d’atténuer les effets négatifs que ces signaux indésirables peuvent avoir sur le fonctionnement sécuritaire du véhicule.
Architecture des systèmes d’un véhicule autonome
Dans un véhicule autonome, la fonction des yeux et des oreilles est assurée par une myriade de capteurs (voir figure 2). Tous ces capteurs sont reliés à un système informatique central chargé de conduire le véhicule en toute sécurité, quelles que soient les conditions du trafic.
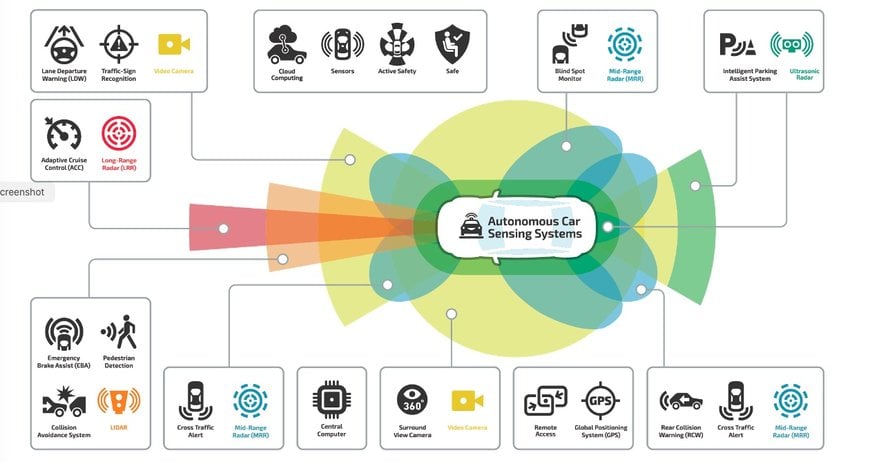
Figure2 : systèmes de détection avancés pour véhicule autonome.
Ces systèmes centralisent donc des capteurs de toutes sortes : radar RF longue portée pour détecter les véhicules, les piétons ou tout autre objet en mouvement à une grande distance du véhicule ; un sous-système vidéo avec un réseau convolutif d’apprentissage automatique pour détecter les piétons, les panneaux routiers et les sorties de voie de circulation ou encore un système de caméra vidéo à 360 degrés permettant au véhicule de cartographier son environnement par rapport aux objets mobiles ou fixes qui l’entourent. Afin de connaître à tout moment et avec précision la position du véhicule, un système de navigation GNSS haute performance offre une précision au centimètre près et permet la navigation à l’estime lorsque le véhicule pénètre dans des canyons urbains ou emprunte des tunnels.
Les protocoles réseau fiables et robustes CAN et Ethernet assurent l’interconnexion des sous-systèmes avec un niveau de latence acceptable (< 5 ms). La tendance actuelle veut que les sous-systèmes vidéo et radars incluent de plus en plus fréquemment des moteurs d’inférence d’apprentissage automatique pour détecter et classer les objets au point de détection plutôt que de confier au système central une charge de calcul supplémentaire. Cette approche permet aussi de réduire de façon générale le temps de latence en temps réel, ce qui est un facteur critique dans la conception d’un véhicule pouvant se déplacer à plus de 30 m/s (soit 112 km/h). La latence exerce une influence sur le moment de la prise de décision et interdit l’utilisation de tout système basé sur le cloud pour des opérations liées à la conduite en temps réel. Par exemple, le réseau cellulaire 4G a une latence aller-retour typique de 60 millisecondes de seconde. Durant ce laps de temps, un véhicule se déplaçant à 30 m/s aura déjà parcouru 1,8 mètre. FlexRay et LIN sont deux autres protocoles de réseau automobile largement utilisés.
Le HD BaseT se profile comme un protocole réseau viable pour répondre aux besoins d’infodivertissement et de transmission vidéo des véhicules. Ce protocole combine en effet le meilleur de l’HDMI et de l’Ethernet. Applicable de façon optimale dans différents domaines, ce protocole automobile n’utilise qu’un câble unique pour transporter à la fois les données audio, vidéo, Ethernet et USB ainsi que 100 W de PoE et les commandes système. Il est recommandé d’utiliser une seule paire non blindée pour relier des appareils jusqu’à 15 m de distance. Le fait que les différents éléments de transmission soient intégrés dans un seul câble permet en outre de réduire considérablement le poids du câblage, mais aussi de réaliser des économies en termes de travail d’installation et de coûts des matériaux.
Afin de garantir la fiabilité et la sécurité du fonctionnement des véhicules autonomes, l’ensemble des systèmes interconnectés et interdépendants doit pouvoir fonctionner en continu et sans la moindre erreur. Si un capteur commence à montrer des signes de défaillance ou si le circuit de surveillance du sous-système détecte des performances inférieures à la normale, une alerte doit immédiatement être transmise à l’ordinateur central afin de déclencher un arrêt de sécurité.
Défis techniques et pistes pour réduire l’impact
Les capteurs électroniques et les sous-systèmes associés nécessitent pour fonctionner des composants analogiques et numériques hautement sophistiqués. Ces dispositifs sont sensibles aux perturbations causées par les transitoires électriques, les interférences électromagnétiques (EMI) et les décharges électrostatiques (ESD). Des transitoires peuvent être générées sur les rails d’alimentation par une commutation dV/dt rapide. Elles créent alors des pics de tension plusieurs fois supérieurs à la tension d’alimentation nominale. Les moteurs électriques de forte puissance et autres charges inductives peuvent provoquer des transitoires de surtension rapides durant le fonctionnement. La chaîne de transmission associée à un véhicule électrique est sans aucun doute une source de transitoires. Cependant, les petits moteurs utilisés pour la direction à commande électrique, les commandes des systèmes de contrôle du confort et de la carrosserie et les freins de stationnement à commande électrique peuvent également créer des transitoires importants. Les transitoires peuvent pénétrer dans un sous-système, soit conduits le long de rails d’alimentation communs, soit par des câbles adjacents tels que ceux reliant les capteurs aux sous-systèmes ou assurant la connexion réseau des sous-systèmes à l’ordinateur central. Sans protection adéquate, les transitoires peuvent entraîner la réinitialisation ou le verrouillage des microprocesseurs ou, dans des cas extrêmes, endommager physiquement des composants critiques.
De même, les interférences électromagnétiques induites peuvent entraîner un comportement imprévisible et erratique du système. Les sources d’interférences sont multiples, par exemple les smartphones ou les points d’accès sans fil. Là encore, il importe de prévoir une protection adéquate afin d’empêcher que de trop importantes interférences électromagnétiques perturbent le fonctionnement d’un système critique.
Les décharges statiques sont un problème très préoccupant lorsqu’elles touchent des composants électroniques sensibles. Ces composants doivent donc être manipulés avec beaucoup de précautions en cours de production et tout au long de la chaîne d’approvisionnement, mais ils doivent aussi être protégés une fois installés dans le circuit final. À l’instar des transitoires, les décharges statiques provoquent des pics de tension massifs. Elles peuvent être provoquées par une accumulation d’énergie due au frottement entre les pneus en caoutchouc et la route ou par le contact entre une personne et les tissus du véhicule. Les véhicules circulant dans des régions faiblement humides sont également sensibles à l’électricité statique.
Protection d’un sous-système de communication et de contrôle ADAS
La figure 3 illustre les principaux blocs fonctionnels d’un sous-système de communication et de contrôle ADAS. Y sont également indiqués les dispositifs de protection nécessaires.
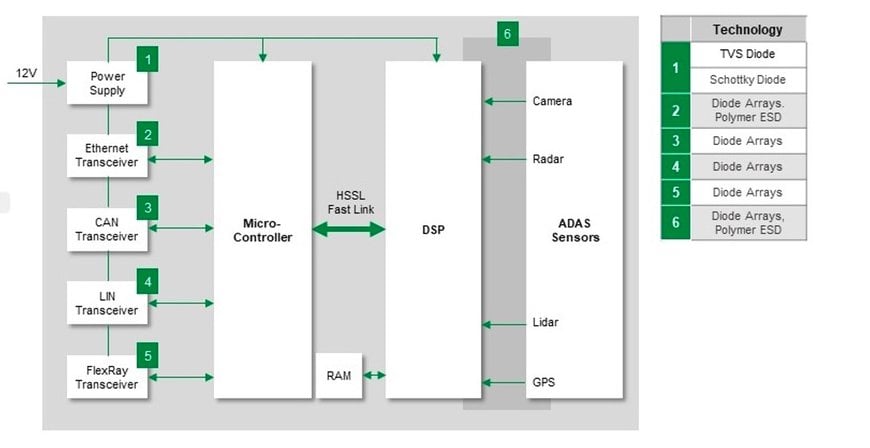
Figure 3 : sous-système de communication et de contrôle ADAS et dispositifs de protection nécessaires.
Chaque liaison de communication (2, 3, 4 et 5) nécessite une protection contre les transitoires et les décharges électrostatiques compatibles avec les spécifications électriques et les débits de données de chaque protocole. Le plus rapide des protocoles utilisés est Ethernet, avec un débit binaire généralement compris entre 100 Mb/s et 10 Gb/s. Pour les interfaces différentielles haute vitesse Ethernet, une des méthodes recommandées de protection contre les décharges électrostatiques et les transitoires de surtension est l’utilisation d’un polymère suppresseur de décharges électrostatiques tel que ceux de la gamme AXGD Xtreme-Guard de Littelfuse qui répondent en outre à la norme AEC-Q200.
La figure 4 illustre où installer un appareil de la série AXGD dans la connexion Ethernet reliant une paire torsadée différentielle au PHY Ethernet. Avec un temps de réponse rapide et une capacité d’absorption pouvant atteindre 30 kV pour des transitoires allant jusqu’à 50 A, la série AXGD assure la protection d’une paire différentielle dans un seul dispositif. De plus, en affichant une valeur de capacité extrêmement faible, la protection contre les décharges électrostatiques n’a aucun effet sur les débits de données Ethernet jusqu’à 1 Gb/s.
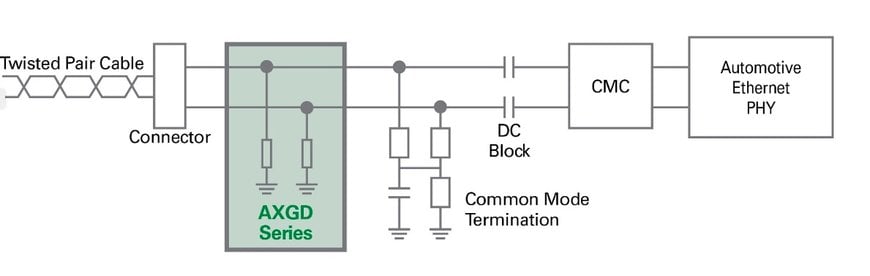
Figure4 : schéma fonctionnel illustrant un dispositif de protection contre les décharges électrostatiques en polymère pour un émetteur-récepteur Ethernet.
Pour la protection d’une interface émetteur-récepteur CAN contre les transitoires rapides et les décharges électromagnétiques, il est recommandé d’utiliser des réseaux de diodes. La Figure 5 illustre l’utilisation d’un réseau de diodes de la gamme AQ24CANA de Littelfuse.
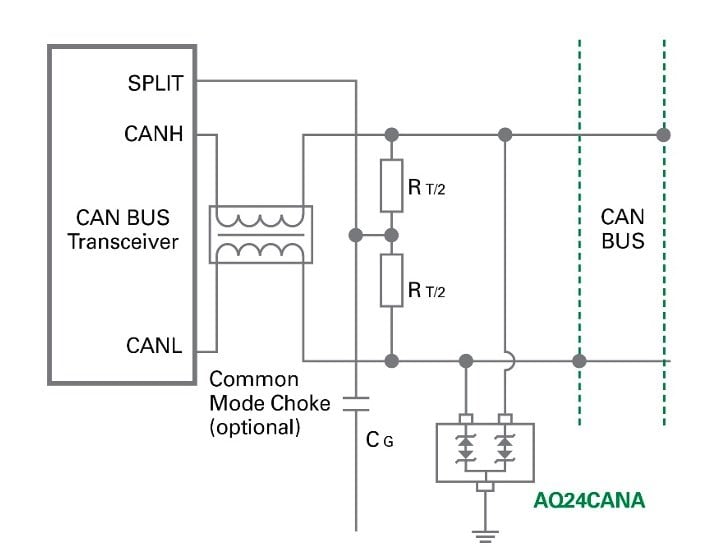
Figure 5 : protection contre les décharges électrostatiques d’un émetteur-récepteur de bus CAN utilisant un réseau de diodes Littelfuse AQ3400 répondant à la norme AEC-Q101.
Un autre exemple de diodes de suppression de tension transitoire (TVS) basées sur une diode Zener est la gamme de diodes TVS 600 W SZ1SMB de Littelfuse. Ces diodes sont idéales pour des alimentations telles que l’élément 1 de la figure 3. Les diodes de la gamme SZ1SMB possèdent d’excellentes capacités de serrage et un temps de réponse rapide et peuvent en outre absorber de fortes transitoires de surtension.
Normes pour l’électronique automobile
Lors de la sélection de composants pour la protection des systèmes automobiles électroniques contre les transitoires et les décharges électromagnétiques, mieux vaut vérifier qu’ils répondent aux normes internationales en vigueur. Les plus importantes normes ISO en la matière sont les normes ISO 7637-2, ISO 16750-2 et ISO10605:2008. En plus de ces normes, l’Automotive Electronics Council (AEC) a établi une série de normes de qualité qui définissent les critères relatifs aux contraintes mécaniques, électriques et environnementales pour les composants utilisés dans les systèmes électroniques automobiles. Parmi les autres normes pertinentes, l’AEC-Q101 concerne les composants discrets tels que les semi-conducteurs et les diodes et l’AEC-Q200 se rapporte aux composants passifs tels que les condensateurs, les résistances et les inducteurs.
Conclusion
Afin de garantir un fonctionnement continu, fiable et irréprochable des systèmes électroniques des véhicules autonomes, il est absolument essentiel de les doter d’une protection efficace contre les effets des transitoires, des interférences électromagnétiques et des décharges électrostatiques. Les véhicules autonomes portent la promesse de réduire considérablement les embouteillages et de rendre nos routes plus sûres pour les conducteurs, les passagers et les piétons. En utilisant des composants de protection contre les surtensions et les décharges électrostatiques, les concepteurs peuvent être sûrs que leurs systèmes seront suffisamment robustes pour résister aux perturbations électriques indésirables.
www.mouser.fr
