
www.industrieweb.fr
16
'21
Written on Modified on
Bin Picking : Le dévracage simplifié
Le dévracage est une des applications les plus complexes de l’automatisation. Le réglage des paramètres pour identifier et saisir en toute sécurité des objets souvent complexes est exigeant et requiert une grande expertise. LHRobotics.Vision, un logiciel de Liebherr-Verzahntechnik GmbH, simplifie considérablement le dévracage pour les utilisateurs, grâce à l’intelligence artificielle (IA).

Le dévracage joue un rôle de plus en plus important dans l’automatisation. Prélever une pièce dans un conteneur est une des tâches les plus complexe : Le robot doit, identifier différents objets disposés de manière chaotique ayant une géométrie parfois complexe, les prélever sans collision avec le conteneur, les orienter, les transférer vers la machine. La prise en compte des interactions entre les différents composants, conteneur et pince demande beaucoup d’expérience et de savoir-faire de la part de l’opérateur.
Bin Picking: Le challenge
La mise en place de solutions de dévracage est donc un enjeu technologique majeur pour les utilisateurs. Dans la plupart des cas, vous ne pouvez pas le faire sans l’aide du fabricant ou de l’intégrateur du système. Mais que diriez-vous si le système était capable d’auto-apprentissage et d’ajustement des paramètres pendant le réglage ou même pendant son fonctionnemment ? Liebherr-Verzahntechnik GmbH, l’un des principaux fabricants de solutions d’automatisation, s’est penché sur cette question et travaille sur le développement de son propre logiciel LHRobotics.Vision. L’utilisation de l’intelligence artificielle (IA) simplifie considérablement le paramétrage pour l’opérateur. "Nous voulons rendre le Bin Picking accessible à tous" résume Jürgen Groβ, directeur des ventes chez Liebherr, résumant ainsi l’objectif du projet.
Liebherr est connu pour être un fabricant de cellules robotisées complètes avec un logiciel de dévracage intégré. En 2020, il a été décidé de proposer ce logiciel en tant que produit indépendant. Ainsi, il peut-être utilisé dans des installations d’autres fabricants, le rendant encore plus attractif pour les utilisateurs finaux ainsi que pour les intégrateurs.
Pack technologique LHRobotics.Vision
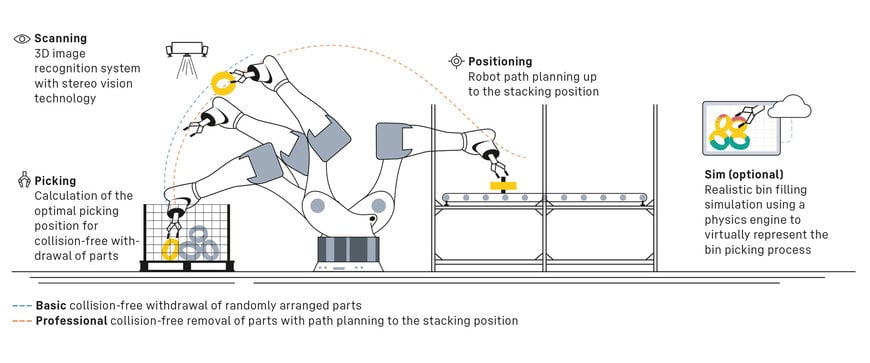
Ce pack comprend, en plus du logiciel graphique et intuitif, un système de caméra 3D avec projecteur intégré, permettant une reconnaissance d’image orientée objet grâce à l‘analyse d’une image stéréo en 3D. Un nuage de points est généré à partir des données 3D des composants et des contours d’interférences des conteneurs permettant ainsi la planification de la trajectoire du prélèvement de composants sans collision. Les points de préhension sur le composant peuvent être facilement définis graphiquement dans le logiciel supprimant la nécessitée d’un apprentissage fastidieux du robot.
En option, l’outil de simulation "LHRobotics.Vision Sim" est disponible. Le jumeau numérique simule le remplissage du conteneur, puis crée et analyse un nuage de points virtuels. Cela permet à l’utilisateur d’ajuster virtuellement la géométrie de la pince et d’optimiser les processus afin d’obtenir un meilleur taux de vidage même des caisses profondes, sans risque et sans investissement coûteux dans un matériel de test
L’IA au cœur du système
Une nouvelle version du logiciel LHRobotics.Vision sera disponible à partir de septembre 2021. L’intelligence artificielle et l’auto-apprentissage permettent de configurer automatiquement de nouveaux composants dans le processus de dévracage: un grand bond en avant pour cette technologie. Le système calcule les paramètres géométriques des composants sur la base de données de balayage réelles et analyse la résolution et le rapport signal/bruit du capteur. Ces données de scan génèrent ensuite des mesures de test qui permettent de déterminer les paramètres de réglage optimaux. Cela simplifie les processus et permet d’économiser du temps et de l’argent. Au fur et à mesure que le système s’entraine à chaque scan lors de sa configuration, il crée la base de l’étape suivante : l’auto-apprentissage en mode automatique.
Prédestiné aux applications d’e-mobilité
"De nombreux utilisateurs considèrent que le dévracage est une application trop complexe à mettre en œuvre chez eux. Avec la nouvelle version du logiciel, nous pouvons maintenant dissiper ces craintes chez nos utilisateurs et intégrateurs" déclare Jürgen Groβ et de poursuivre : "Nous considérons le changement de paradigme dans l’ensemble de l’industrie comme une chance : la mutation du secteur automobile et la transition vers les applications de e-mobilité nous obligent à relever de nouveaux défis".
Ainsi, Liebherr mise dès aujourd’hui sur des sytèmes de vision dotés d’intelligence artificielle pour l’insertion automatique et fiable des connexions de câbles flexibles : par exemple les connecteurs de modules des blocs de batteries pour véhicules électriques. Les changements apportés par l’e-mobilité affectent non seulement le groupe moto-propulseur, mais également les carrosseries qui sont de plus en plus légères. Ici aussi, Liebherr s’appuie avec succès sur LHRobotics.Vision pour le dévracage de pièces en tôle.
A l’avenir, la complexité croissante des géométries et des caractéristiques des pièces représentera un défi majeur pour le Bin Picking. "L’IA est une technologie clé sans laquelle il sera difficile de répondre à ces besoins", déclare Jürgen Groβ. "Chez Liebherr, nous connaissons bien les attentes des utilisateurs et nous y apportons toutes notre expertise en matière de processus. Cela fait de nous un véritable partenaire pour l’industrie et pour les développements futurs", conclut-il.
Jumeau numérique: Un jumeau numérique est un programme de simulation qui modèlise les interactions et les collisions d’objets dans un monde virtuel. Il prend en compte des paramètres tels que la gravité, l’élasticité, le frottement et la quantité de mouvement entre les objets en collision.
www.liebherr.com
