
www.industrieweb.fr
04
'22
Written on Modified on
Les systèmes de détection SICK garantissent la sécurité et l'autonomie des robots mobiles

Les robots mobiles autonomes ou AMR (Autonomous Mobile Robots) se déplacent en toute autonomie dans les ateliers et les entrepôts. S’ils peuvent le faire en toute sécurité, c’est grâce à l’efficacité du scrutateur laser, des codeurs et du contrôleur de sécurité qu’ils embarquent. Si les scrutateurs laser, les LiDAR, et les codeurs sont les yeux et les oreilles des AMR, le contrôleur de sécurité en est le cerveau qui, selon les informations reçues, va demander au robot mobile de se mettre en position sûre dès l’instant qu’un obstacle est détecté.
Les robots mobiles autonomes ou AMR (Autonomous Mobile Robots) se sont invités dans de nombreux sites industriels et plates-formes logistiques. Ils offrent en effet davantage de flexibilité que les traditionnels AGV (Automated Guided Vehicle pour véhicule guidé automatiquement), qui se déplacent, certes tout aussi automatiquement, mais en suivant un système de guidage au sol. Les AMR peuvent quant à eux transporter des charges et des colis d’un point à un autre d’un atelier sans être tributaire d’un marquage au sol. Nombre d’entre eux exploitent une technologie de navigation baptisée SLAM (Simultaneous Localization And Mapping) pour se repérer et se déplacer en toute autonomie dans leur environnement. Ce procédé de localisation et de cartographie simultanées permet aux AMR de créer et d’améliorer la carte de l’environnement au sein duquel ils évoluent et de s’y localiser. Du coup, un simple paramétrage logiciel suffit pour leur affecter de nouvelles missions nécessitant un changement de parcours. Ce qui est effectivement bien moins aisé pour un AGV qui ne peut évoluer qu’en suivant les guidages fixes. Pour changer le trajet d’un AGV, il faut donc modifier les marquages au sol.
Pas d’autonomie sans détection efficace
Cependant, si lesAMR peuvent se passer de systèmes de guidage matériels, c’est qu’ils s’appuient sur la fiabilité de leurs détecteurs et contrôleurs embarqués. C’est grâce à ces derniers qu’ils se repèrent dans leur environnement en toute circonstance et s’y déplacent en toute autonomie et en toute sécurité. Ces détecteurs sont en quelques sortes les yeux et les oreilles des AMR. Sans eux, il leur serait impossible de détecter un obstacle ou une personne passant à proximité et donc de les contourner, de ralentir ou de s’arrêter afin d’éviter toute collision.
Chaque constructeur intègre à son AMR des systèmes de détection appropriés pour la navigation et la sécurité afin de s’assurer que le robot mobile se situe dans l’espace et respecte au final les exigences de sécurité de la directive de référence dite ''Directive Machines'' 2006/42/CE. L’intégrateur ou le constructeur doit en effet respecter des exigences essentielles de santé et de sécurité énumérées dans cette directive. Pour répondre à ces exigences, des scrutateurs laser, et des codeurs incrémentaux de sécurité sont essentiels aux AMR.
Capteurs LiDAR 3D, pour la navigation
Les capteurs LiDAR 3D détectent les objets se situant dans leur environnement, que les objets soient en mouvement ou non. C’est la raison pour laquelle les capteurs LiDAR 3D sont parfaitement adaptés aux applications telles que la prévention contre les collisions sur des véhicules automatiques. Embarqués aux AMR, ils assurent la détection des objets qui les entourent ainsi que leur reconnaissance 3D. Le LiDAR (LIght Detection And Ranging pour détection et estimation de la distance par laser) émet via des diodes lasers un faisceau de lumière invisible balayant l’environnement qui l’entoure. Il détecte ainsi les cibles se trouvant à une plus ou moins grande distance afin de créer une cartographie 3D des objets se trouvant à proximité. L’ensemble des informations fournies par le capteur LiDAR est traité par le système de localisation et de cartographie simultanée de type SLAM (Simultaneous Localization And Mapping). Ce qui permet à l’AMR de se repérer et se déplacer en toute autonomie dans son environnement.
Scanners laser (ou scrutateurs laser) de sécurité
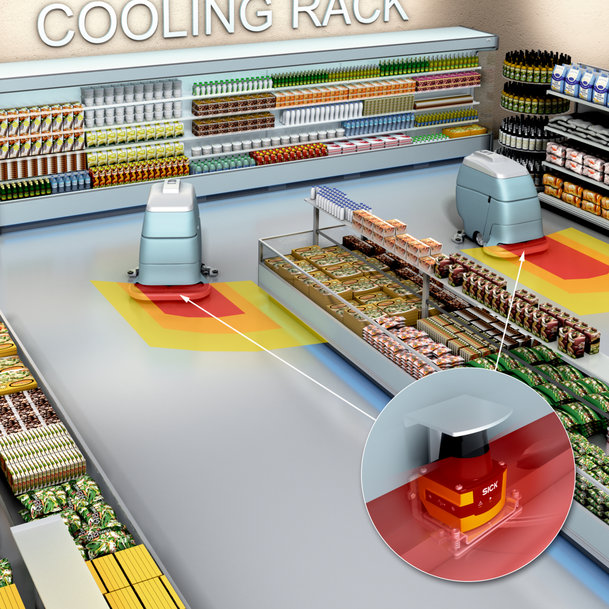
Les scrutateurs laser de sécurité permettent de détecter sans contact et à longue distance de manière sûre, tout objet se trouvant dans leur champ de vision. Le véhicule dispose ainsi du temps nécessaire pour s’arrêter en toute sécurité et éviter la collision avec une personne ou un obstacle se trouvant sur son trajet. Le système doit prendre en compte la distance que pourra parcourir le robot avant l’arrêt sûr du mouvement. L’arrêt nominal de sécurité contrôlé est assuré par des fonctions de sécurité qui surveillent la vitesse ou la position des axes du robot. Un scrutateur laser peut également repérer l’approche de l’opérateur (ou de toute autre personne) dans une première zone d’alerte. Le robot ralentit puis s’arrête lorsqu’une deuxième zone d’alerte, plus proche, est franchie. Les robots employés dans cette configuration doivent donc être capables de s’arrêter suffisamment vite et avec fiabilité afin d’éviter toute collision.
Le scrutateur laser de sécurité nanoScan3 de SICK, par sa compacité et sa hauteur d’à peine 80 mm, s’intègre aisément dans un espace réduit et convient parfaitement à la protection et à la localisation des robots mobiles via l’exploitation des données de mesure. Il exploite la technologie de balayage safeHDDM® qui met à profit de nombreuses impulsions laser successives pour chaque point de mesure et un processus de filtrage et d’analyse spécifique des données. Cette technologie lui permet de s’affranchir d’éventuelles perturbations dues à la lumière, la poussière et la saleté. Ce scrutateur laser, est capable de détecter des objets dont le taux de réflectance est d’à peine 1,8 % tel que celui d’un pantalon noir, il dispose d’une portée du champ de protection de 3 mètres avec un angle de balayage de 275°. Jusqu’à 128 champs de détection peuvent être librement configurés par l’utilisateur.
Codeurs de sécurité, pour le contrôle de vitesse sûre (Motion Control)
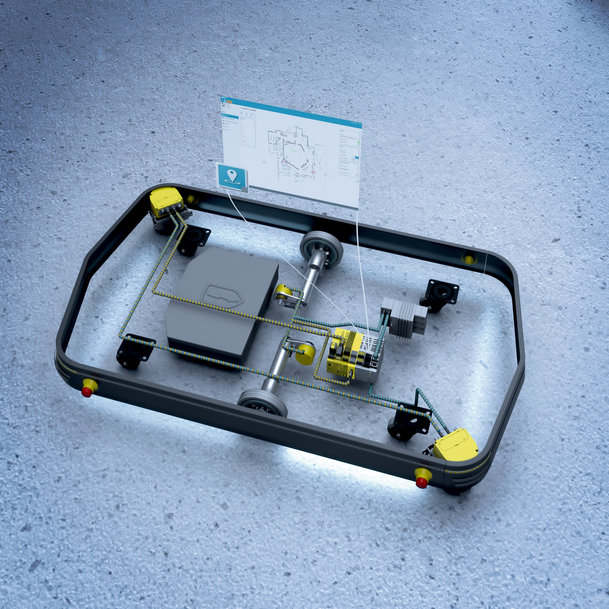
Si le scrutateur laser de sécurité est indispensable à la détection sûre, les codeurs de sécurité sont tout aussi cruciaux pour surveiller avec fiabilité la vitesse de l’AMR ou encore détecter son sens de déplacement. Ils sont les garants de la sécurité fonctionnelle de l’AMR. Les codeurs génèrent des informations nécessaires pour commuter automatiquement les scénarios d’alerte du scrutateur laser de sécurité en fonction de la vitesse et de l’angle de braquage commandés par les systèmes d’entraînement de l’AMR. Le codeur incrémental de sécurité DFS60S Pro de SICK satisfait aux exigences de sécurité et de fiabilité les plus strictes. Il s’agit d’un composant de sécurité certifié jusqu’au niveau SIL 2 et PL d et supporte les fonctions de sécurité des entraînements selon la norme IEC 61800-5-2. Il se distingue par la grande précision de son système optique de génération d’impulsions et sa haute résistance mécanique notamment aux vibrations générées par les imperfections du sol.
Contrôleur de sécurité, pour sécuriser l’ensembledu système

Les scrutateurs laser de sécurité fournissent les informations concernant la position des intrus (objet ou personne) dans les zones balayées par le faisceau laser. Les codeurs de sécurité délivrent les données sûres relatives aux mouvements du chariot mobile. Ces informations doivent être traitées très rapidement afin d’activer si nécessaire le processus d’arrêt ou de ralentissement du robot mobile. C’est là le rôle du système de commande de sécurité programmable qui va prendre, en fonction des données reçues, la décision qui lui est dictée par le programme de sécurité et transmettre aux systèmes d’entraînement les commandes appropriées afin qu’ils se mettent dans la situation de sécurité attendue.
Le Flexi Soft Drive Monitor a ainsi été conçu par SICK pour garantir une surveillance sûre des mouvements, de la vitesse, de la direction et de la position des axes dans le cadre d’applications mobiles. Ses fonctions logiques répondent aux exigences de sécurité des applications mobiles dans le secteur de la logistique. Configurable par logiciel, il garantit la mise en œuvre de fonctions de sécurité des entraînements : Arrêt sûr, Maintien à l’arrêt sûr (SOS), Surveillance sûre de la vitesse (SSM), Limitation sûre de vitesse (SLS), Sens de déplacement sûr (SDI), Commande de freinage sûre (SBC), Came sûre (SCA), Limitation sûre de position (selon le type).
https://www.sick.com/fr/fr/
