
www.industrieweb.fr
03
'23
Written on Modified on
Des solutions robotiques intelligentes grâce aux données de capteurs
SICK a un rôle de leader dans le domaine des capteurs et des solutions complètes pour une robotique intelligente et pérenne.
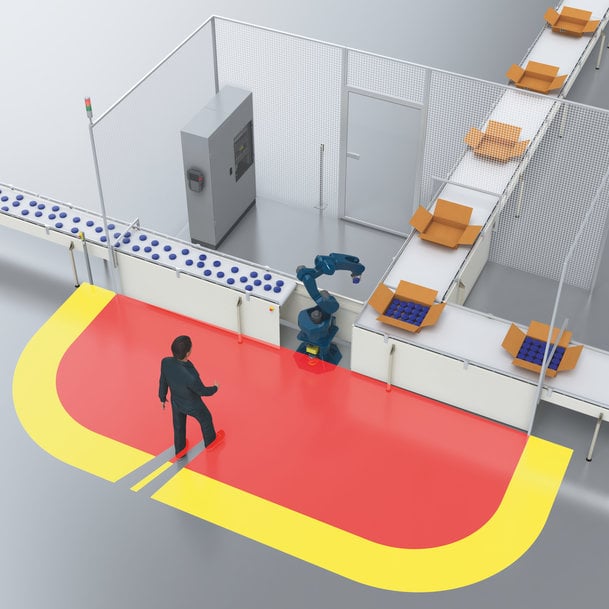
Grâce à la perception adaptative de l’environnement avec sBot Speed, les humains peuvent intervenir aisément et de façon sécurisée dans un système de robots.
Le progrès de l’automatisation et de la numérisation constitue la clé pour améliorer l’efficience des processus, tout particulièrement dans le domaine de la robotique.
Des solutions robotiques intelligentes grâce aux données de capteurs
Safe Robotics, Robot Vision, feedback de position, outillage de bras de robot manipulateur - SICK a un rôle de leader dans le domaine des capteurs et des solutions complètes pour une robotique intelligente et pérenne.
Le progrès de l’automatisation et de la numérisation constitue la clé pour améliorer l’efficience des processus tout particulièrement dans le domaine de la robotique.
En général, les défis sont complexes. Ils peuvent cependant être maîtrisés grâce à la collecte, l’analyse, l’utilisation et la visualisation des données des capteurs. Les informations nécessaires pour des applications robotiques (intelligentes et numérisées) telles que la protection contre les mouvements et le guidage optique des robots, la détection de position ainsi que la surveillance sensible des préhenseurs sont fournies par des capteurs et systèmes de capteurs intelligents de l’entreprise.
Une interaction humains robots sécurisée grâce à la perception adaptative du capteur
Le système de robotique sûre sBot Speed de SICK constitue une solution facile à intégrer pour la protection optimisée des applications robotiques. Le système complet se compose d’un scrutateur laser de sécurité et d’un système de commande de sécurité Flexi Soft. Il est intégrable dans l’écosystème des constructeurs de robots Universal Robots, KUKA, FANUC et Yaskawa et offre alors un plan de câblage complet en plus des fonctions d’automatisation et de sécurité préconfigurées et testées. Ceci garantit l’intégration aisée du système dans la commande de robot concernée. Le sBot Speed se démarque par la perception adaptative de l’environnement. Elle assure l’intervention sécurisée des humains dans un système de robots. Plus une personne s’avance dans la zone de travail du robot, plus ce dernier ralentit jusqu’à s’arrêter complètement. Lorsque la personne quitte le champ de protection et d’alarme, le robot redémarre automatiquement, d’abord à vitesse réduite avant d’atteindre à nouveau la vitesse de travail initiale.
Guidage en 2D pour les applications robotiques statiques et dynamiques
Le système de capteur PLOC2D de SICK est adapté à la localisation automatique d’objets 2D sur les systèmes de convoyage.
Il peut aussi, via la synchronisation par codeur du convoyeur, détecter des pièces en mouvement sur une bande transporteuse et communiquer ainsi au robot les coordonnées de prise et de dépose correspondantes dynamiquement. Le système est composé d’une caméra 2D performante avec éclairage intégré ainsi que d’un logiciel de détection doté d’un algorithme de localisation intelligent et d’une synchronisation de mouvement. Le PLOC2D , capable de localiser plus de 120 pièces par minute, est conçu pour l’intégration dans un grand nombre de modèles de robots et leurs contrôleurs. Il se démarque par des temps d’installation courts, notamment grâce à son interface utilisateur en ligne et son procédé d’apprentissage facile et convivial pour des pièces différentes.
Feedback-moteur avec sHub® pour robots : mesure de la vitesse et de la position avec fonction de Condition Monitoring
Les systèmes Feedback-moteur de SICK dans les servomoteurs fournissent des mesures et données ultras précises sur les positions linéaires et rotatives des axes du robot dans l’espace. Au-delà de la fonction « Détection de l’orientation du robot », ces systèmes de retour avec sHub®, le hub de capteurs pour servomoteurs intelligents, deviennent également une source de données en temps réel pour la surveillance d’état. Peu encombrant, le module prolonge le système Feedback-moteur avec des capteurs supplémentaires pour mesurer les vibrations et la température. Ces deux grandeurs de mesure fournissent des données cruciales pour la détection précoce des dommages.
Ainsi, en plus des données de processus du moteur, des données d’état et de service sont également transmises vers le système de contrôle de mouvement du robot via le protocole purement numérique de feedback-moteur HIPERFACE DSL à l’aide d’une technologie monocâble. Les informations sur l’amplitude des vibrations indiquent le moment où la prochaine maintenance du robot et de son servomoteur est nécessaire. Comme la surveillance s’effectue en temps réel, le personnel de maintenance est en mesure de réagir à temps et d’intervenir dans les processus des machines. Ainsi, sHub® augmente l’efficience et la fiabilité des machines car des arrêts imprévus peuvent être empêchés. L’interface de communication du sHub®, au niveau d’intégrité de la sécurité SIL3, permet de réaliser des applications de sécurité ou Safe Motion Monitoring and Control en liaison avec le système Feedback-moteur sûr EDS/EDM35.
Capteur de position intelligent : sensibilité accrue pour les préhenseurs
Faire la différence entre des objets de tailles différentes et les saisir de manière fiable le capteur de position intelligent MPS-G pour les préhenseurs et les vérins miniatures de SICK offre cette flexibilité. Son système de mesure de distance saisit et numérise en continu, directement et sans contact les courses de préhension et de levage ainsi que la position des doigts des préhenseurs pneumatiques ou celle du piston dans les vérins de levage court. Ainsi, le capteur est parfaitement préparé à affronter le défi du lot 1, car il permet aux robots une préhension précise avec des objets de forme géométrique et de taille différentes donc une manutention des pièces avec une grande sensibilité. En même temps, le MPS-G soutient le Condition Monitoring des robots via un diagnostic de l’actionneur.
Pour cela, le capteur est en mesure de surveiller les vibrations et les chocs pendant les processus de préhension et de manutention ainsi que de détecter des variations de température qui indiquent une usure ou un relâchement de la force de préhension. Via une intégration intelligente, les données générées sont mises à la disposition de systèmes principaux : automate industriel programmable, système MES/ERP, application cloud.
De cette manière, les données de diagnostic de l’actionneur sont utilisées pour la surveillance d’état. Elles contribuent à éviter des temps d’arrêt des machines et augmentent la transparence des processus automatisés.

L’application SICK Augmented Reality App SARA contribue à l’identification rapide des causes lorsqu’un robot s’arrête ou lorsqu’une défaillance survient sur un cobot pour une raison inconnue.
Lorsqu’un robot s’arrête, quand une défaillance survient sur un cobot, la recherche de la cause source et la suppression des défauts peuvent prendre beaucoup de temps et causer l’arrêt de la production. C’est pourquoi, dans de tels cas, on a de plus en plus fréquemment recours à SARA (SICK Augmented Reality App). En effet, l’application pour smartphones et tablettes avec système d’exploitation iOS ou Android permet de rechercher les causes des défaillances directement sur place. Pour cela, le système de diagnostic sans fil ajoute à la vue de l’environnement réel (captée par le capteur vidéo du smartphone) avec la visualisation des erreurs par réalité augmentée directement sur le terminal mobile. Par ailleurs, d’autres données du capteur peuvent être affichées et être déterminantes pour la recherche et la réparation du défaut : identifiant de l’appareil, état, température, degré d’encrassement, heures de service. La visualisation intelligente de SARA contribue ainsi à identifier et à éliminer rapidement les causes des arrêts.
Les solutions de détection de SICK pour la « Robotique 4.0 »
La robotique industrielle est une des impulsions décisives pour les concepts d’automatisation pérennes de demain. De la coexistence en passant par la coopération jusqu’à la collaboration l’humain et le robot collaborent de plus en plus comme « collègues » dans divers scénarios de travail. SICK fournit ici les solutions adaptées à toutes les exigences de la robotique : Safe Robotics, Robot Vision, retour de position et outillage du manipulateur du robot.
Le Safe Robotics de SICK propose des solutions qui sécurisent la collaboration directe du robot. La perception adaptative de son environnement permet aux humains d’intervenir de manière complète et sécurisée dans l’environnement de travail du robot, et garantit ainsi une collaboration sûre et étroite avec les humains.
Les systèmes optiques et basés sur caméra du portefeuille Robot Vision constituent les yeux du robot. Ils lui permettent son guidage en 2D et 3D et constituent la condition essentielle pour des solutions d’automatisation flexibles et productives.
Les solutions de feedback de position de SICK constituent la base sensorielle de tous les mouvements du robot. En tant que Smart Motor Sensors, les systèmes Feedback moteur intégrés aux entraînements fournissent les données sur la vitesse et la position ainsi que sur l’état de l’entraînement.
Avec le portefeuille d’outillage de bras de robot manipulateur, SICK propose des solutions de détection sophistiquées et intelligentes pour les préhenseurs, les outils robotiques et les systèmes d’alimentation. Elles confèrent au robot un maximum de sensibilité.
www.sick.com
Le progrès de l’automatisation et de la numérisation constitue la clé pour améliorer l’efficience des processus, tout particulièrement dans le domaine de la robotique.
Des solutions robotiques intelligentes grâce aux données de capteurs
Safe Robotics, Robot Vision, feedback de position, outillage de bras de robot manipulateur - SICK a un rôle de leader dans le domaine des capteurs et des solutions complètes pour une robotique intelligente et pérenne.
Le progrès de l’automatisation et de la numérisation constitue la clé pour améliorer l’efficience des processus tout particulièrement dans le domaine de la robotique.
En général, les défis sont complexes. Ils peuvent cependant être maîtrisés grâce à la collecte, l’analyse, l’utilisation et la visualisation des données des capteurs. Les informations nécessaires pour des applications robotiques (intelligentes et numérisées) telles que la protection contre les mouvements et le guidage optique des robots, la détection de position ainsi que la surveillance sensible des préhenseurs sont fournies par des capteurs et systèmes de capteurs intelligents de l’entreprise.
Une interaction humains robots sécurisée grâce à la perception adaptative du capteur
Le système de robotique sûre sBot Speed de SICK constitue une solution facile à intégrer pour la protection optimisée des applications robotiques. Le système complet se compose d’un scrutateur laser de sécurité et d’un système de commande de sécurité Flexi Soft. Il est intégrable dans l’écosystème des constructeurs de robots Universal Robots, KUKA, FANUC et Yaskawa et offre alors un plan de câblage complet en plus des fonctions d’automatisation et de sécurité préconfigurées et testées. Ceci garantit l’intégration aisée du système dans la commande de robot concernée. Le sBot Speed se démarque par la perception adaptative de l’environnement. Elle assure l’intervention sécurisée des humains dans un système de robots. Plus une personne s’avance dans la zone de travail du robot, plus ce dernier ralentit jusqu’à s’arrêter complètement. Lorsque la personne quitte le champ de protection et d’alarme, le robot redémarre automatiquement, d’abord à vitesse réduite avant d’atteindre à nouveau la vitesse de travail initiale.
Guidage en 2D pour les applications robotiques statiques et dynamiques
Le système de capteur PLOC2D de SICK est adapté à la localisation automatique d’objets 2D sur les systèmes de convoyage.
Il peut aussi, via la synchronisation par codeur du convoyeur, détecter des pièces en mouvement sur une bande transporteuse et communiquer ainsi au robot les coordonnées de prise et de dépose correspondantes dynamiquement. Le système est composé d’une caméra 2D performante avec éclairage intégré ainsi que d’un logiciel de détection doté d’un algorithme de localisation intelligent et d’une synchronisation de mouvement. Le PLOC2D , capable de localiser plus de 120 pièces par minute, est conçu pour l’intégration dans un grand nombre de modèles de robots et leurs contrôleurs. Il se démarque par des temps d’installation courts, notamment grâce à son interface utilisateur en ligne et son procédé d’apprentissage facile et convivial pour des pièces différentes.
Feedback-moteur avec sHub® pour robots : mesure de la vitesse et de la position avec fonction de Condition Monitoring
Les systèmes Feedback-moteur de SICK dans les servomoteurs fournissent des mesures et données ultras précises sur les positions linéaires et rotatives des axes du robot dans l’espace. Au-delà de la fonction « Détection de l’orientation du robot », ces systèmes de retour avec sHub®, le hub de capteurs pour servomoteurs intelligents, deviennent également une source de données en temps réel pour la surveillance d’état. Peu encombrant, le module prolonge le système Feedback-moteur avec des capteurs supplémentaires pour mesurer les vibrations et la température. Ces deux grandeurs de mesure fournissent des données cruciales pour la détection précoce des dommages.
Ainsi, en plus des données de processus du moteur, des données d’état et de service sont également transmises vers le système de contrôle de mouvement du robot via le protocole purement numérique de feedback-moteur HIPERFACE DSL à l’aide d’une technologie monocâble. Les informations sur l’amplitude des vibrations indiquent le moment où la prochaine maintenance du robot et de son servomoteur est nécessaire. Comme la surveillance s’effectue en temps réel, le personnel de maintenance est en mesure de réagir à temps et d’intervenir dans les processus des machines. Ainsi, sHub® augmente l’efficience et la fiabilité des machines car des arrêts imprévus peuvent être empêchés. L’interface de communication du sHub®, au niveau d’intégrité de la sécurité SIL3, permet de réaliser des applications de sécurité ou Safe Motion Monitoring and Control en liaison avec le système Feedback-moteur sûr EDS/EDM35.
Capteur de position intelligent : sensibilité accrue pour les préhenseurs
Faire la différence entre des objets de tailles différentes et les saisir de manière fiable le capteur de position intelligent MPS-G pour les préhenseurs et les vérins miniatures de SICK offre cette flexibilité. Son système de mesure de distance saisit et numérise en continu, directement et sans contact les courses de préhension et de levage ainsi que la position des doigts des préhenseurs pneumatiques ou celle du piston dans les vérins de levage court. Ainsi, le capteur est parfaitement préparé à affronter le défi du lot 1, car il permet aux robots une préhension précise avec des objets de forme géométrique et de taille différentes donc une manutention des pièces avec une grande sensibilité. En même temps, le MPS-G soutient le Condition Monitoring des robots via un diagnostic de l’actionneur.
Pour cela, le capteur est en mesure de surveiller les vibrations et les chocs pendant les processus de préhension et de manutention ainsi que de détecter des variations de température qui indiquent une usure ou un relâchement de la force de préhension. Via une intégration intelligente, les données générées sont mises à la disposition de systèmes principaux : automate industriel programmable, système MES/ERP, application cloud.
De cette manière, les données de diagnostic de l’actionneur sont utilisées pour la surveillance d’état. Elles contribuent à éviter des temps d’arrêt des machines et augmentent la transparence des processus automatisés.
L’application SICK Augmented Reality App SARA contribue à l’identification rapide des causes lorsqu’un robot s’arrête ou lorsqu’une défaillance survient sur un cobot pour une raison inconnue.
Lorsqu’un robot s’arrête, quand une défaillance survient sur un cobot, la recherche de la cause source et la suppression des défauts peuvent prendre beaucoup de temps et causer l’arrêt de la production. C’est pourquoi, dans de tels cas, on a de plus en plus fréquemment recours à SARA (SICK Augmented Reality App). En effet, l’application pour smartphones et tablettes avec système d’exploitation iOS ou Android permet de rechercher les causes des défaillances directement sur place. Pour cela, le système de diagnostic sans fil ajoute à la vue de l’environnement réel (captée par le capteur vidéo du smartphone) avec la visualisation des erreurs par réalité augmentée directement sur le terminal mobile. Par ailleurs, d’autres données du capteur peuvent être affichées et être déterminantes pour la recherche et la réparation du défaut : identifiant de l’appareil, état, température, degré d’encrassement, heures de service. La visualisation intelligente de SARA contribue ainsi à identifier et à éliminer rapidement les causes des arrêts.
Les solutions de détection de SICK pour la « Robotique 4.0 »
La robotique industrielle est une des impulsions décisives pour les concepts d’automatisation pérennes de demain. De la coexistence en passant par la coopération jusqu’à la collaboration l’humain et le robot collaborent de plus en plus comme « collègues » dans divers scénarios de travail. SICK fournit ici les solutions adaptées à toutes les exigences de la robotique : Safe Robotics, Robot Vision, retour de position et outillage du manipulateur du robot.
Le Safe Robotics de SICK propose des solutions qui sécurisent la collaboration directe du robot. La perception adaptative de son environnement permet aux humains d’intervenir de manière complète et sécurisée dans l’environnement de travail du robot, et garantit ainsi une collaboration sûre et étroite avec les humains.
Les systèmes optiques et basés sur caméra du portefeuille Robot Vision constituent les yeux du robot. Ils lui permettent son guidage en 2D et 3D et constituent la condition essentielle pour des solutions d’automatisation flexibles et productives.
Les solutions de feedback de position de SICK constituent la base sensorielle de tous les mouvements du robot. En tant que Smart Motor Sensors, les systèmes Feedback moteur intégrés aux entraînements fournissent les données sur la vitesse et la position ainsi que sur l’état de l’entraînement.
Avec le portefeuille d’outillage de bras de robot manipulateur, SICK propose des solutions de détection sophistiquées et intelligentes pour les préhenseurs, les outils robotiques et les systèmes d’alimentation. Elles confèrent au robot un maximum de sensibilité.
www.sick.com
