
www.industrieweb.fr
19
'23
Written on Modified on
Faulhaber: Les VGA et les AMR deviennent plus complexes
L'industrie 4.0 et l'intralogistique 4.0. modifient l'environnement de production et influent donc sur les véhicules à guidage automatique (AGV) et les robots mobiles autonomes (AMR). Pour aider l'industrie à suivre les tendances avec un développement rapide et rentable, Markus Fenn et le professeur Stefan May ont conçu Eduard, une plateforme d'enseignement et de prototypage qui permet de reproduire les tendances actuelles.
BS : Comment est née votre plateforme robotique ?
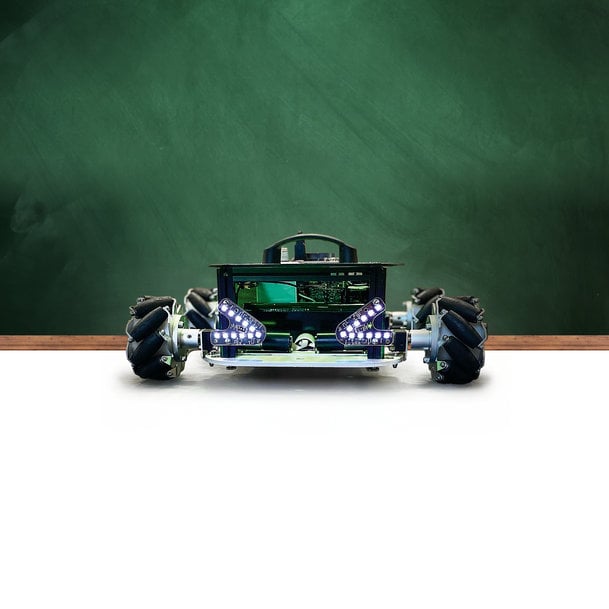
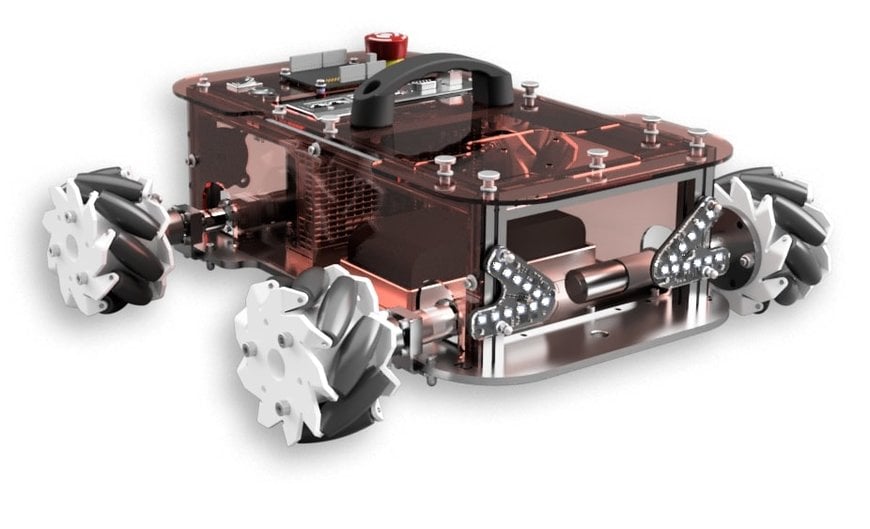
Markus Fenn : Le robot lui-même s'appelle « Eduard ». Il mesure environ 40 x 40 x 15 cm et pèse près de 8 kg. C'est le résultat de la demande d'une entreprise auprès du professeur Stefan May. L'entreprise recherchait une plateforme pour la formation et le perfectionnement des employés en matière de robotique mobile. C'est pourquoi EduArt Robotik GmbH propose, en plus de la plateforme robotique, une offre d'enseignement et de services pour tester et optimiser.
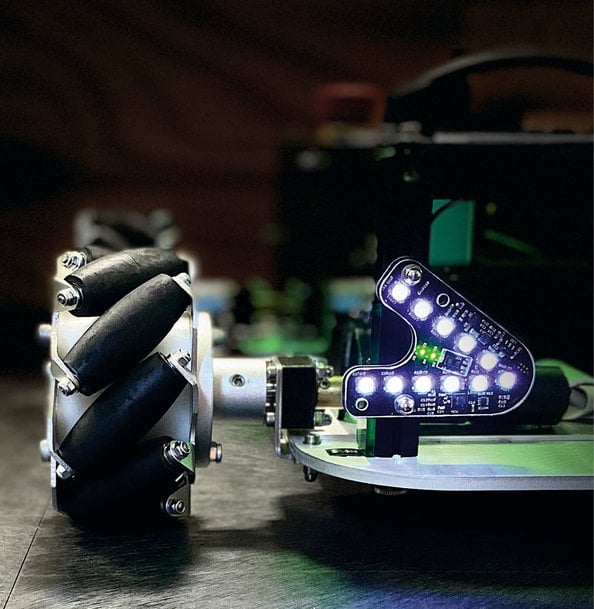
Nous proposons la plateforme avec de simples pneus en caoutchouc, mais aussi avec des roues Mecanum. Celles-ci permettent au robot de tourner sur place et de se déplacer latéralement ou en diagonale. Il est ainsi capable de se positionner et de naviguer avec précision dans des espaces très restreints. Les pneus en caoutchouc sont utilisés essentiellement pour des tests en extérieur ou dans la robotique de sauvetage, mais uniquement dans le cadre de scénarios fictifs. Le choix de moteurs FAULHABER de grande qualité s'avère idéal pour ces deux applications.
BS : Qu'est-ce qui rend votre plateforme robotique unique ?
Markus Fenn : La plateforme dispose d'interfaces ouvertes, d'un concept de capteur intégré avec appareils de mesure de distance et d'inertie intégrés, ainsi que d'un système de contrôle des batteries d'accumulateurs (BMS) intégré. Cet équipement de base peut être complété à la demande du client, soit par nous, soit par le client lui-même. Cela permet par exemple au client de sélectionner le rapport de réduction de l'entraînement (72:1 ou 89:1) en fonction de la vitesse ou du couple requis(e). Le client peut ainsi tester ses nouveaux concepts de manière rentable. Mais nous aidons également à la mise en œuvre des solutions d'application.
BS : Quel intérêt représente l'utilisation d'EduArt dans l'industrie ?
Markus Fenn : Les AGV et les AMR jouent un rôle de plus en plus important dans l'automatisation, mais les entreprises restent malheureusement peu ou mal informées. La plateforme robotique permet par exemple de tester rapidement et facilement un nouveau système de capteur. Et comme la plateforme peut être étendue en fonction des besoins, elle permet de faire passer les informations pertinentes en production.

BS : Les tendances en matière de AGV et d'AMR vont vers une plus grande autonomie. Ils « deviennent » un composant de la production et agissent avec des modules de production plutôt qu'avec des convoyeurs à bande. Les AGVet les AMR travaillent donc ensemble par nécessité. Peuvent-ils se comprendre ?
Markus Fenn : Les AGV et les AMR disposent de l'interface standard VDA5050 et sont donc également en mesure de communiquer avec le centre de commande. Les clients peuvent facilement tester de nouveaux logiciels à l'aide d'une plateforme comme Eduard, les résultats sont ensuite transposables à 100% aux grands AGV et AMR. Il est ainsi possible d'évaluer les applications sans trop de simulation, puisque le logiciel reste pratiquement identique, que ce soit avec Eduard ou avec un grand système. Pour faciliter la planification et l'expansion, un jumeau numérique est disponible avec la plateforme sur demande.
BS : Les systèmes d'entraînement d'Eduard doivent également répondre aux futures exigences des concepts AGV et AMR. Quels systèmes d‘entraînement utilisez-vous pour la plateforme et pourquoi ?
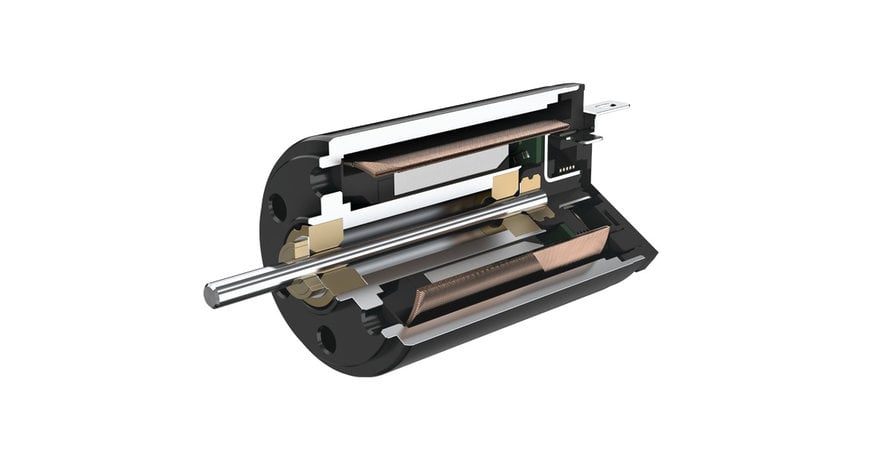
Markus Fenn : Pour notre plateforme de formation et de démonstration de faisabilité (PoC), nous utilisons des micromoteurs C.C. à commutation métaux précieux de FAULHABER. Malgré leur petite taille, ils peuvent générer un couple important et sont très peu gourmands en énergie. Ils sont également faciles à commander et conviennent aux boucles de régulation de haute précision.
Pour les plateformes plus grandes, nous utilisons de gros moteurs C.C. du même fabricant afin de permettre une démonstration de faisabilité rapide, par exemple une contrôlabilité simple avec votre propre électronique. Si nécessaire, nous les remplaçons par des moteurs C.C. sans balais pour l'application, car ils ne nécessitent pas d'entretien et ont une durée de vie accrue .

BS : Depuis longtemps, la production se caractérise par une diminution de la taille des lots et une augmentation du nombre de variantes. Quels en sont les conséquences pour la logistique et pour le fonctionnement des AGV et des AMR ?
Markus Fenn : Il faut des robots pour des charges inférieures, c'est-à-dire des robots plus petits avec des entraînements plus petits mais plus puissants, comme les entraînements de grande qualité de FAULHABER. Ces chariots industriels autonomes ont moins d'électronique et des batteries plus petites, ce qui signifie un poids inférieur et une consommation d'énergie réduite. Si les charges augmentent à nouveau, il est facile de passer à l'échelle supérieure et de travailler en réseau, car les robots peuvent collaborer sans collision grâce à des entraînements de haute précision.
BS : Plus de fonctionnalités implique plus de complexité pour les AGV et les AMR. Qu'est-ce qui est faisable et qu'est-ce qui est raisonnable ?
Markus Fenn : Pour les AGV et les AMR, seule la partie logicielle est complexe. La planification est importante pour que les AGV puissent travailler ensemble sans problème. L’ AGV doit être le plus intelligent possible afin de pouvoir non seulement reconnaître les palettes, mais aussi voir si elles sont pleines ou vides, voire inclinées. C'est là que l'intelligence artificielle (IA) entre en jeu. La complexité augmente avec l'utilisation de l'IA et notre petit robot est idéal pour la tester efficacement.
BS : Une autre tendance est celle des grandes flottes automatisées, pour lesquelles une gestion de flotte s'avère indispensable.
Markus Fenn : Pour cela, les robots doivent interagir les uns avec les autres, « penser » par eux-mêmes, échanger des informations via des interfaces standard et, si nécessaire, coopérer. Que l’ AGV ou l'AMR soit petit ou grand, le logiciel est essentiellement le même. La différence entre les programmes ne concerne que quelques lignes. Le logiciel a uniquement besoin de quelques informations sur l'AMR. Par exemple, il doit calculer l'emplacement du robot sur le plan du hall. La navigation, qui est l'un des rares composants à connaître les dimensions du robot, recherche ensuite le chemin approprié. Cependant, les tests sont toujours importants car la robotique mobile n'en est qu'à ses débuts et il n'existe donc pas encore beaucoup de normes.
Pour atteindre la vitesse requise, le contrôleur de moteur calcule le nombre de tours de roue nécessaires. L'ajustement de ce nombre nécessite trois lignes de code ou un fichier de configuration. FAULHABER fournit des moteurs avec des réducteurs de haute précision et des codeurs pour un positionnement précis, et ensemble, ceux-ci offrent des performances et une sécurité optimales.
BS : L'intralogistique 4.0 et l'industrie 4.0 exigent des AGV et des AMR en réseau. Qu'en est-il du fonctionnement via le cloud ou, mieux encore, via la périphérie ? Et comment la sécurité et le piratage entrent-ils en ligne de compte dans ces scénarios ?
Markus Fenn : En fonction du fabricant, il est possible de rendre les systèmes « non piratables » dans une certaine mesure en isolant le matériel d'internet. Les robots sont équipés de scanners de sécurité avec des capteurs de distance pour éviter qu'ils ne se heurtent à un mur. Cela signifie que même s'il est piraté, le robot ne peut pas effectuer de mouvements dangereux. Et les données de processus sont aussi sûres au sein du réseau que le réseau de l'entreprise lui-même.
BS : L'objectif de l'industrie 4.0 est de créer des systèmes auto-organisés, hétérogènes et multimodaux. Ceux-ci nécessitent un échange de données entre les AGV et les AMR, et l'intelligence artificielle a également besoin de données. Quelles sont les exigences pour les composants de FAULHABER, étant donné qu'ils doivent également collecter et transmettre des données ?
Markus Fenn : Cela se fait via la 5G ou via le réseau local sans fil interne de l'entreprise. Les systèmes n'ont pas besoin des données en temps réel puisque les données de la phase de planification sont disponibles. Par exemple, les trajectoires et les vitesses sont disponibles dans le système depuis la planification des routes et ne changent pas constamment. Si le robot se déplace d'un point à l'autre, un signe de vie toutes les quelques secondes suffit. Il y a donc moins de trafic de données, cela évite de surcharger les réseaux. Les données elles-mêmes sont fusionnées et évaluées dans l'AMR. Les codeurs enregistrent ce qui se passe et assurent une commande sûre avec les contrôleurs.
BS : Quel est le degré de sécurité des AGV et des AMR ?
Markus Fenn : Ils sont très sûrs. Si l'un des quatre moteurs tombe en panne, le contrôleur de moteur le détecte et stoppe le mouvement. Si une personne pénètre dans la zone de déplacement, le scanner laser le détecte et le système freine. Ces deux niveaux de sécurité sont suffisants.
BS : Dans quels domaines la recherche est-elle encore nécessaire pour développer les futurs AGV et AMR et comment votre plateforme de test évoluera-t-elle en fonction de ces exigences ? Dans le même temps, les exigences en matière d'entraînement augmentent également. Qu'en est-il de l'entraînement du futur ?
Markus Fenn : Les robots doivent être mieux interconnectés. Par exemple, quatre robots travaillent ensemble sur une tâche de transport, selon le principe que plusieurs petits robots valent mieux qu'un seul grand robot. Pour cela, il faut davantage de petits moteurs qui doivent fonctionner avec une précision absolue, sinon le groupe de robots risque de trébucher ou de perdre le rythme. Pour améliorer la fiabilité, les codeurs doivent être absolument insensibles aux interférences afin que les robots ne soient pas influencés par des perturbations externes. C'est pourquoi FAULHABER utilise parfois deux codeurs sur chaque moteur.
Si l'on prend les diverses variantes de réducteurs de FAULHABER avec leurs différents diamètres et longueurs, ainsi que les codeurs, les contrôleurs, etc., il est possible de créer 25 millions de combinaisons, dont une grande partie a déjà été réalisée chez FAULHABER. Chaque entreprise peut donc trouver les entraînements parfaits, même pour des applications futures.
