
Miser sur la bonne carte
Cartographie (partiellement) autonome en surface et sous l'eau pour les rivières et les lacs.
en.ids-imaging.com

La condition préalable à un trafic fluvial sûr et efficace en Allemagne est l'existence de cartes actuelles et précises des voies navigables. Les autorités, comme l'Office fédéral de la navigation maritime et de l'hydrographie, mais aussi les exploitants de ports privés sont tenus de les mettre à disposition à tout moment sous une forme actualisée. La raison principale est d'éviter les accidents liés à une carte incorrecte ou obsolète. Il s'agit de la classification des voies navigables fédérales, de leur kilométrage, des écluses, barrages et leviers existants, des eaux environnantes, des lieux et des frontières. Actuellement, la cartographie est réalisée par des bateaux conventionnels avec du personnel formé, ce qui prend beaucoup de temps et coûte cher. Il peut donc y avoir de longs intervalles entre les mesures effectuées à un endroit donné.
Une surveillance (semi-)automatisée des voies navigables par des plateformes autonomes qui évitent les obstacles et détectent le trafic pourrait optimiser ce processus et fournir des cartes dans des délais plus courts. L'Institut Fraunhofer d'optronique, d'ingénierie des systèmes et d'analyse d'images IOSB a développé à cet effet, dans le cadre d'un projet de recherche interne de trois ans, un véhicule autonome de surface capable de mesurer les eaux de manière autonome. À cette fin, le lit de la rivière est capté par un sonar, tandis que les rives et les structures sous-marines sont captées à l'aide d'un système optique doté de deux caméras industrielles intégrées de la société IDS Imaging Development Systems GmbH. Les informations ainsi obtenues sont ensuite fusionnées et transférées sur une carte en 3D des environs.

TAPS, le système de sondage semi-automatique pour les rivières et les lacs, mesure les masses d'eau de manière indépendante.
Application
La mesure précise des eaux est une tâche exigeante. Le système de relèvement semi-automatique pour les rivières et les lacs - en abrégé TAPS - de l'institut IOSB Fraunhofer s'en charge aussi bien sous l'eau qu'en surface. Pour ce faire, le véhicule d'environ 2 x 1,5 x 1 mètre se déplace sur la voie navigable concernée en évitant automatiquement les obstacles, qu'ils soient statiques ou en mouvement. À une vitesse de 2 nœuds - ce qui correspond à environ 3,7 kilomètres par heure - une telle mission peut durer jusqu'à 20 heures. Pour cartographier visuellement les zones riveraines, TAPS dispose de deux caméras fixées sur un mât, orientées respectivement vers tribord et bâbord, et dont les champs de vision ne se chevauchent pas. Grâce à leur haute résolution, elles permettent une inspection visuelle des infrastructures pertinentes, comme les murs de quai, ainsi qu'une modélisation en 3D de la zone riveraine à partir des données d'images enregistrées.
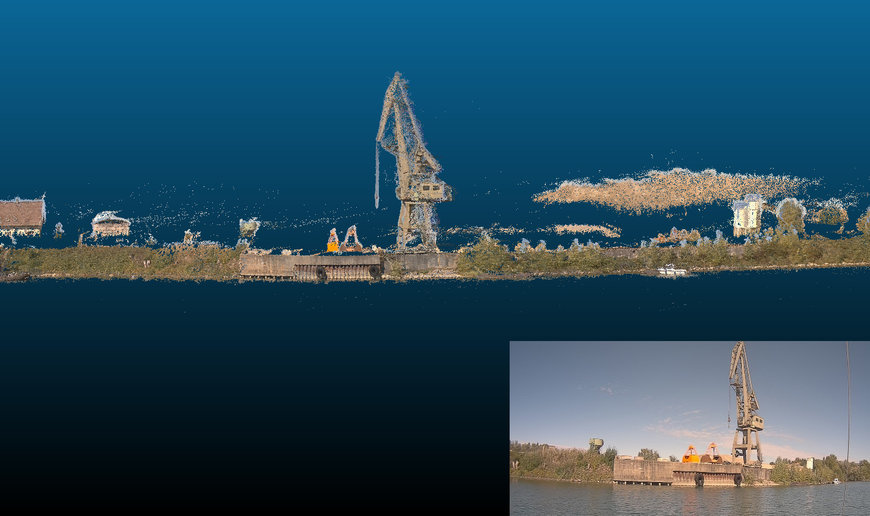
Modèle 3D d'une structure de surface
"Nous utilisons un automatisme pour la prise de vue intelligente. Dès qu'une ou les deux caméras sont dirigées vers une zone d'intérêt prédéfinie, la capture d’image commence. Le mouvement propre du véhicule est en outre utilisé pour enregistrer des données d'images prises sous différents angles et offrant ainsi une valeur ajoutée au contenu", explique Boitumelo Ruf, expert en photogrammétrie au sein du groupe de recherche sur les systèmes robotiques autonomes de l’institut IOSB Fraunhofer. Les données GNSS (Global Navigation Satellite Systems, comme le GPS) et IMU (Inertial Measurement Unit pour la détermination de la position) servent de base à la détermination de la position et de l'orientation de la plate-forme TAPS. "Lors de l'acquisition des images, celles-ci sont enrichies par les données de position GNSS actuelles. Ces dernières seront nécessaires plus tard pour l'attribution de coordonnées précises", poursuit Ruf.
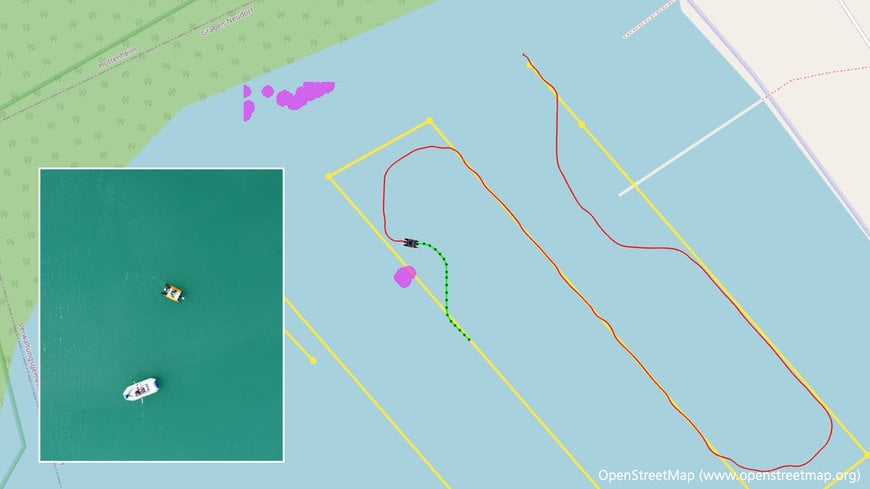
L'embarcation contourne de manière autonome un canot pneumatique en perdition.
Après l'acquisition des données, les images prises sont transmises, avec les données GNSS, à une station de contrôle au sol, où une reconstruction photogrammétrique est effectuée. Boitumelo Ruf décrit la procédure plus en détail : "Nous utilisons notamment la boîte à outils photogrammétrique COLMAP. Elle utilise des caractéristiques d'image exceptionnelles pour effectuer d'abord une comparaison entre les images d'entrée, calculer leurs positions relatives et créer à partir de là un modèle 3D fidèle de l'environnement. Ensuite, à l'aide de l'outil, nous effectuons un matching pixel par pixel des images, c'est-à-dire que nous recherchons les pixels correspondants et les fusionnons de façon exacte. Le résultat est un nuage de points 3D dense qui est géoréférencé à l'aide des positions GNSS, c'est-à-dire qu'il est doté des coordonnées actuelles correspondantes". Le modèle 3D peut ensuite être utilisé pour d'autres tâches, comme les inspections visuelles ou la surveillance des rives.
Des caméras industrielles robustes qui défient le vent et les intempéries
Côté caméras, l'institut Fraunhofer mise sur deux caméras industrielles uEye FA d'IDS. Les modèles robustes et résistants avec PoE conviennent parfaitement aux environnements exigeants. Le boîtier de la caméra, les tubes d'objectif et les connecteurs vissables répondent aux exigences de l'indice de protection IP65/67 et sont donc parfaitement protégés contre la saleté, la poussière et les projections d'eau.
Le modèle utilisé dispose d'un capteur grand format CMOS IMX304 de Sony de 1,1" et fournit des images très claires et sans bruit dans une résolution de 4096 x 3000 pixels. Le capteur à obturateur global de la deuxième génération de pixels de la série Pregius est, grâce à sa remarquable gamme dynamique et à sa très haute sensibilité, particulièrement adapté, entre autres, aux applications dans le domaine de la métrologie.
Ce sont précisément ces caractéristiques qui ont été déterminantes dans le choix de la caméra par l'institut IOSB Fraunhofer. Outre la robustesse et la protection contre les intempéries, les caméras devaient être compactes et offrir une résolution d'image élevée pour permettre des inspections visuelles détaillées. Le capteur devait également offrir une plage dynamique élevée afin de pouvoir capturer des images de façon détaillée, aussi bien dans les zones ensoleillées que dans les zones ombragées. L'intégration via l'interface standard GigE Vision permet de développer et d'utiliser un pilote pour plusieurs systèmes avec différentes caméras.

Pour cartographier visuellement les zones riveraines, TAPS dispose de deux caméras industrielles uEye FA d'IDS fixées sur un mât.
Perspectives
La pénurie de main-d'œuvre qualifiée est également un problème majeur dans le domaine de la mesure des voies navigables. La cartographie automatisée des voies navigables pourrait non seulement réduire les coûts, mais aussi le temps et, surtout, la main-d'œuvre nécessaire. L'objectif du projet TAPS était de développer un prototype pour cette tâche et de démontrer son potentiel dans des scénarios pertinents. En tant qu'institut de recherche, Fraunhofer développe généralement des technologies jusqu'à un certain niveau où la fonctionnalité et l'aptitude du système sont prouvées. La prochaine étape est maintenant la collaboration avec des partenaires industriels. Dr.-Ing. Janko Petereit, directeur du groupe de recherche sur les systèmes robotiques autonomes à l’institut IOSB Fraunhofer, explique : "Nous recherchons activement des partenaires pour franchir ensemble cette dernière étape de la commercialisation. Compte tenu des résultats positifs de nos premiers tests et de la demande croissante de cartes des voies navigables précises et actualisées, nous nous attendons à une forte demande de notre technologie dans les années à venir. Dans ce contexte, les connaissances acquises peuvent être utilisées de diverses manières. Les véhicules nautiques autonomes peuvent être utilisés pour le transport de personnes et de marchandises en mer ou sur les eaux intérieures. On peut également imaginer le creusement de voies navigables ainsi que la mesure autonome des chenaux".
Le projet montre le potentiel élevé de l'interaction entre les systèmes robotiques et le traitement numérique des images. Dans le futur, les cartes pourraient être redistribuées, notamment en ce qui concerne la détection visuelle de l'environnement et l'interprétation des scènes.
Caméra

uEye FA - la caméra industrielle la plus robuste et la plus résistante avec PoE
Modèle utilisé : GV-5200FA
Famille de caméras : uEye FA
Informations complémentaires sur le TAPS >>
www.ids-imaging.fr
This email address is being protected from spambots. You need JavaScript enabled to view it.
